v1.5.0
内容
使用说明
开发板介绍
例程
驱动示例
1. ACMP
2. ADC
3. BUTN
4. CAM_DVP
5. CAN
6. CRC
7. DAC
8. DMA
9. DMAV2
10. ENET
10.1. PPS输出
10.1.1. 概述
10.1.2. 硬件设置
10.1.3. 运行现象
11. EWDG
12. FEMC
13. FFA
14. GPIO
15. GPIOM
16. GPTMR
17. GWC
18. HALL
19. I2C
20. I2S
21. JPEG
22. L1 Cache
23. LCDC
24. LIN
25. LINV2
26. MBX
27. MCAN
28. MCHTMR
29. MIPI_CSI
30. MMC
31. MONO
32. OPAMP
33. PDGO
34. PDMA
35. PLA
36. PLB
37. PLIC
38. PLLCTL
39. PLLCTLV2
40. PMP
41. PPOR
42. PTPC
43. PWM
44. QEI
45. QEIV2
46. QEO
47. RDC
48. RNG
49. RTC
50. SDM
51. SDXC
52. SEI
53. SMIX
54. SPI
55. SYNT
56. TAMP
57. TSNS
58. UART
59. VAD
60. WDG
SDK API 参考
Change Log
HPMico Software Development Kit
驱动示例
10.
ENET
10.1.
PPS输出
在 GitHub 上编辑
10.1.
PPS输出
10.1.1.
概述
本示例展示以太网PPS信号输出
10.1.2.
硬件设置
在指定的管脚测量PPS信号 (请参考
引脚描述
部分)
10.1.3.
运行现象
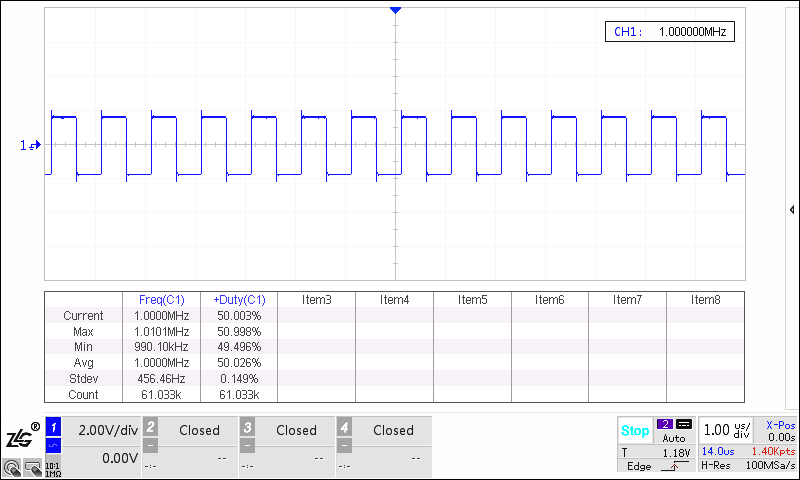
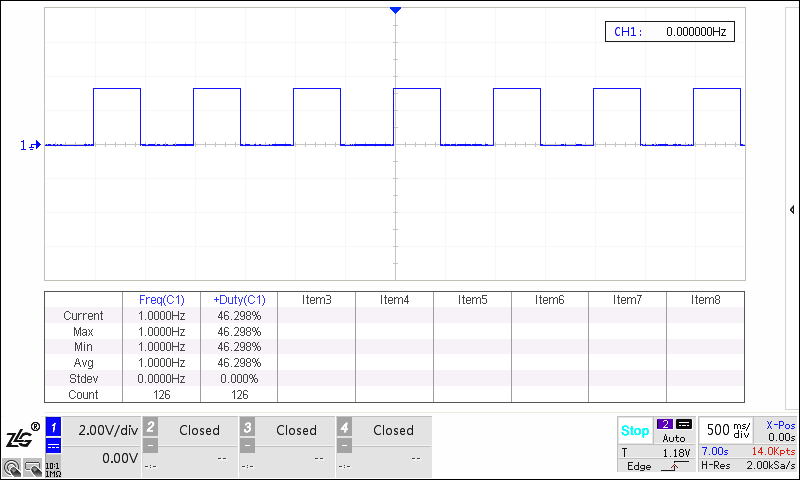
通过示波器观察波形
(1)Flexible模式:
(2)Control模式: