36.3. ECAT_IO
36.3.1. 1. Overview
The ECAT_IO example demonstrates the steps to implement an ECAT digital IO slave station with the slave stack code (SSC).
36.3.2. 2. Prepare
36.3.2.1. 2.1 Hardware
Development board with ECAT, please refer to Pin Description of the development board. Check the ECAT network port/RUN LED/ERR LED and other hardware
PC with Ethernet port
TWinCAT3 software has compatibility issues with PC network cards. some supported Intel network cards
36.3.2.2. 2.2 Software
TwinCAT3.1(Build 4024.56)
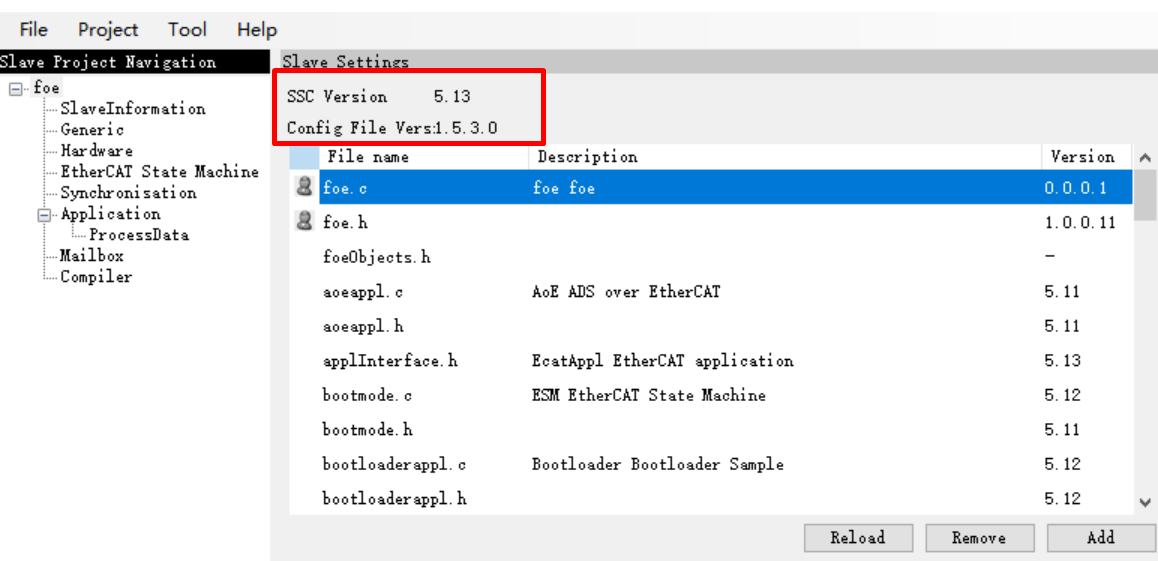
SSC Tool(SSC Version: 5.13; Config File Vers: 1.5.3.0)
36.3.3. 3. Project Setting
36.3.3.1. 3.1 EEPROM Emulation Setting
The default setting is to use Flash to simulate EEPROM
Note: Please allocate appropriate flash space for FLASH-EEPROM content to avoid conflicts with other flash contents
36.3.3.2. 3.2 Using actual EEPROM
set the “ESC_EEPROM_EMULATION” and “CREATE_EEPROM_CONTENT” under the “Hardware” attribute to 0 in SSC Tool, then generate the slave protocol stack code.
Modify
CMakeLists.txtcontext to “set(CONFIG_EEPROM_EMULATION 0)”.
36.3.4. 4. Generate EtherCAT slave stack code
Due to licensing issues, HPMSDK does not provide EtherCAT slave protocol stack code (SSC). Users have download the SSC Tool from Beckoff’s official website and generate the slave stack code according to the steps.
36.3.4.1. 4.1. Download SSC Tool
EnterETG Download website, input “SSC” to fliter resource.
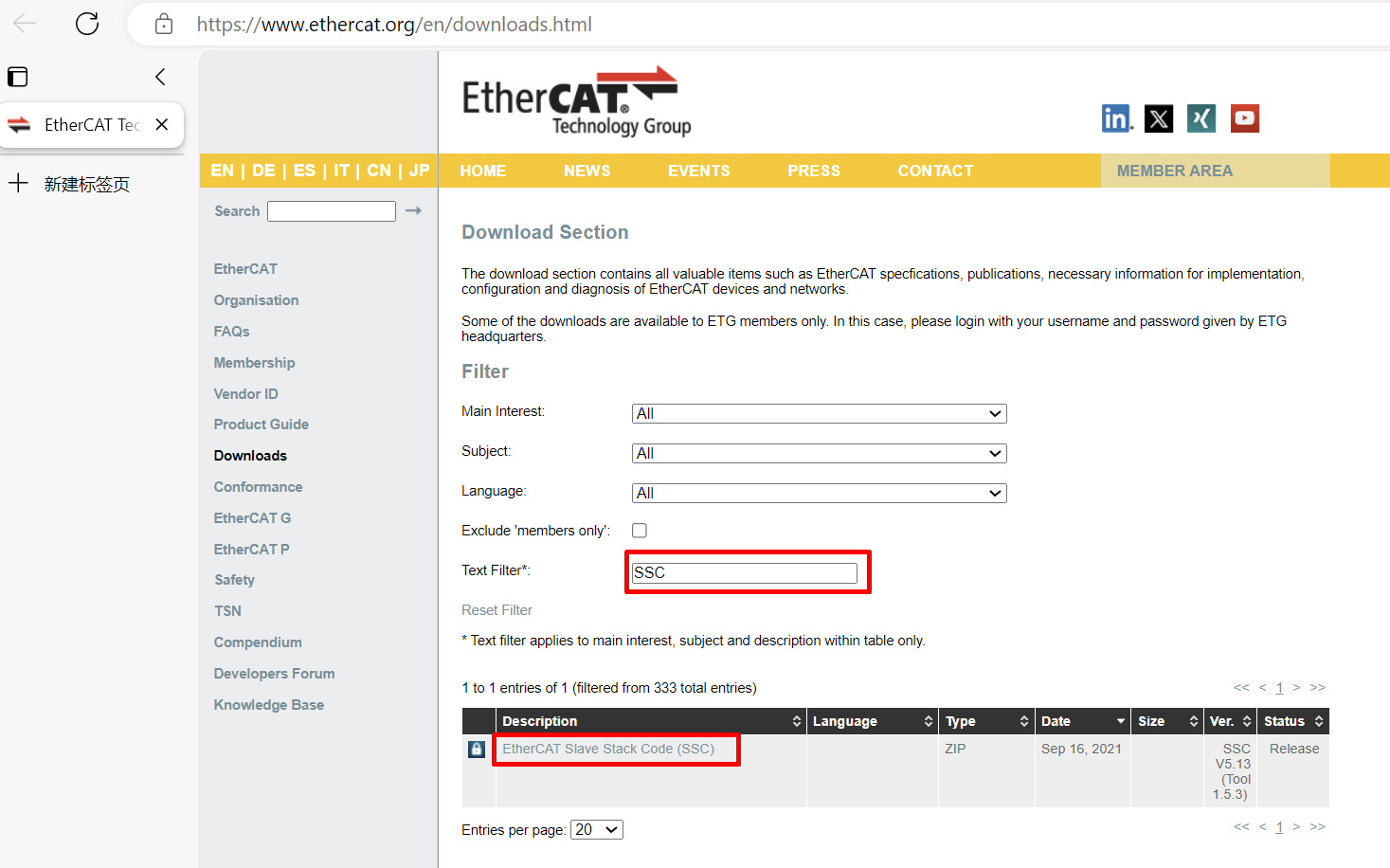
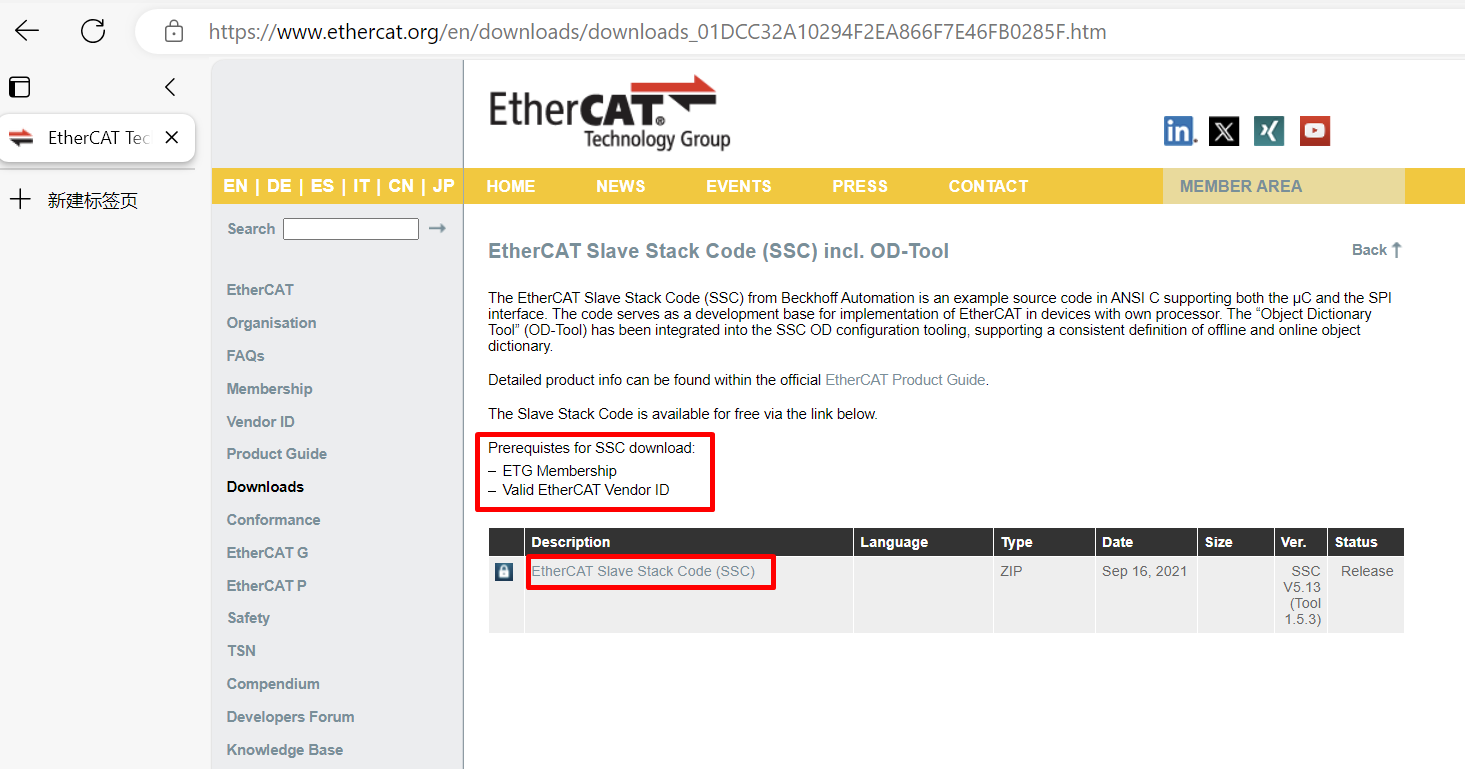
To download, you need to provide an ETG member account and a valid vendor ID
Download and install SSC Tool
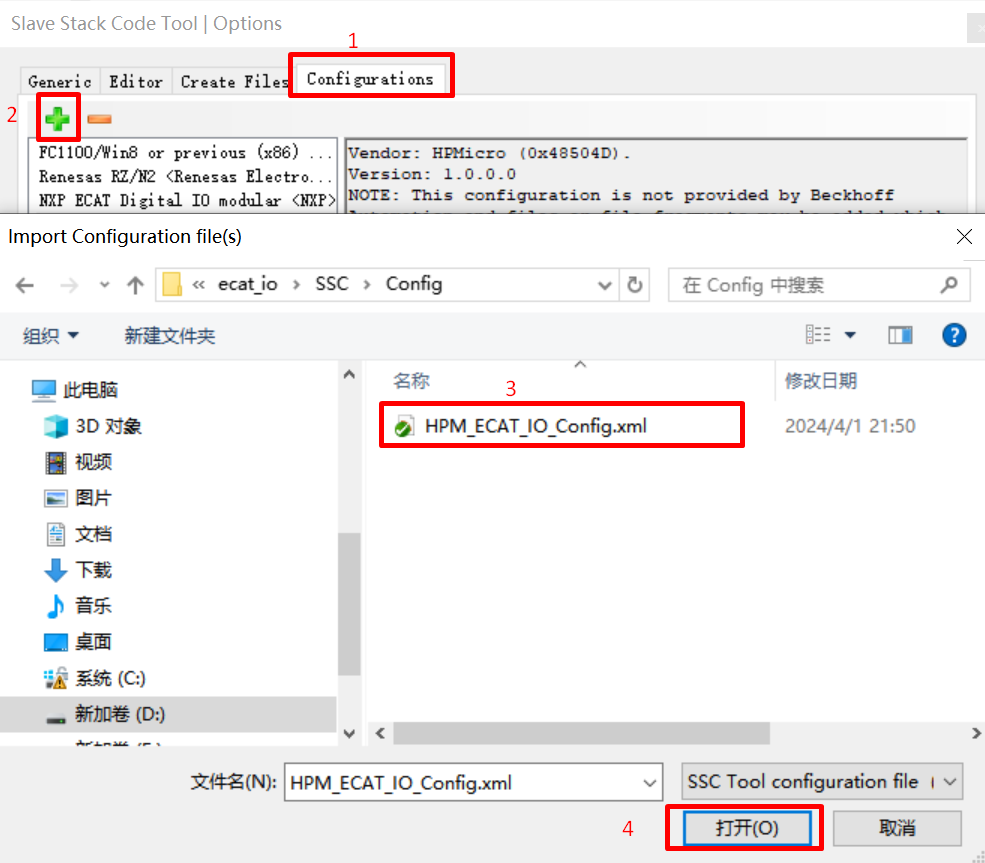
36.3.4.2. 4.2 SSC Tool import configuration files
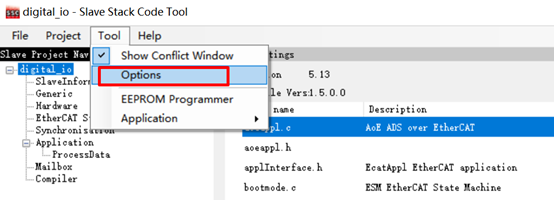
Open SSC Tool, click Tool->Options
click Configurations, import configuration file(<hpm_sdk>/samples/ethercat/ecat_io/SSC/Config/HPM_ECAT_IO_Config.xml)
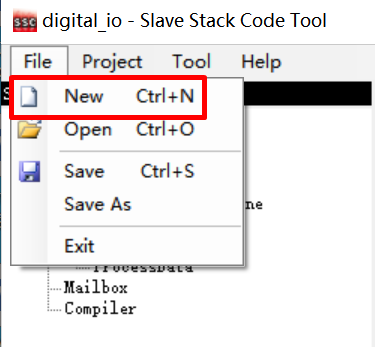
36.3.4.3. 4.3 SSC Tool create new project
click File->New
Click Custom option, and select HPMicro ECAT Digital IO
from the drop-down list 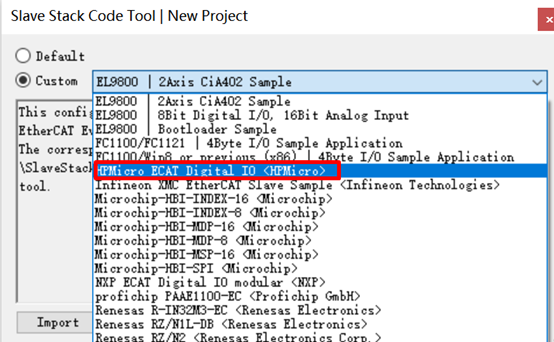
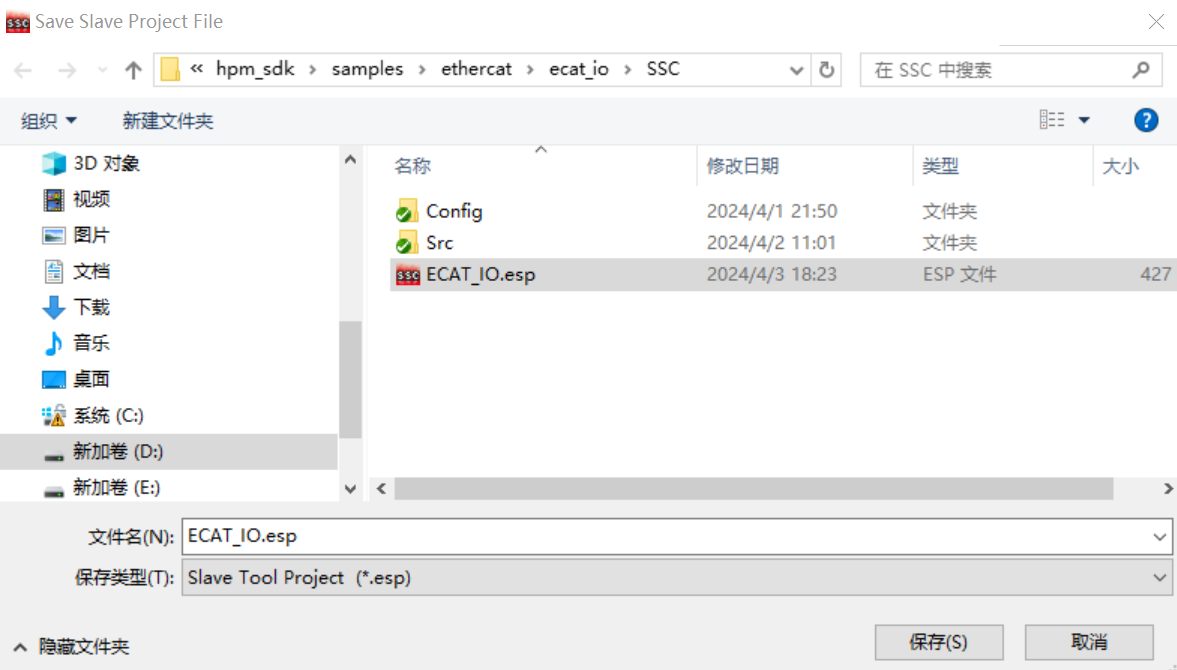
Save project, specify the file path
import application - Click Tool->Application->Import, Import <hpm_sdk>/samples/ethercat/ecat_io/SSC/digital_io.xlsx
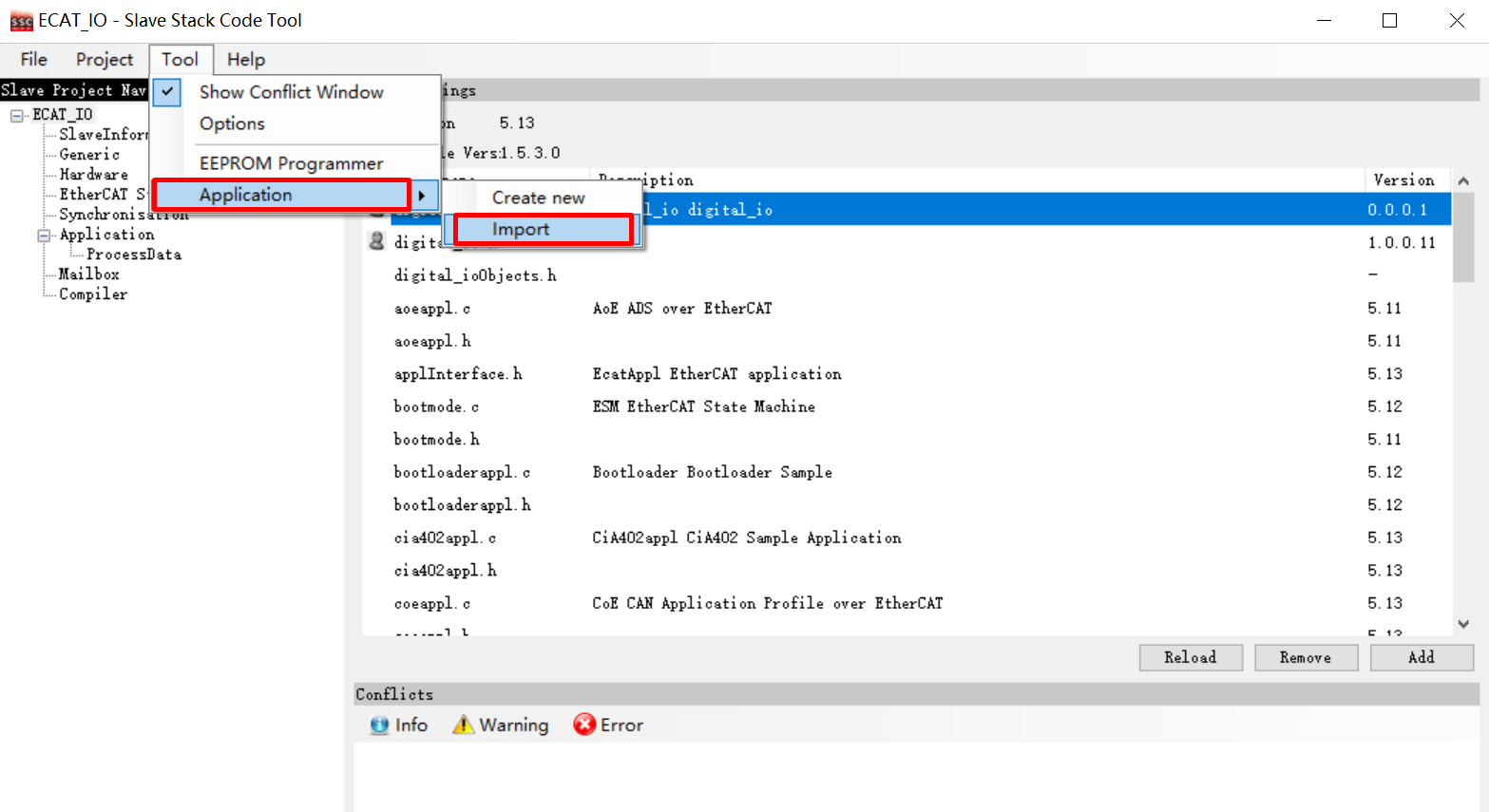
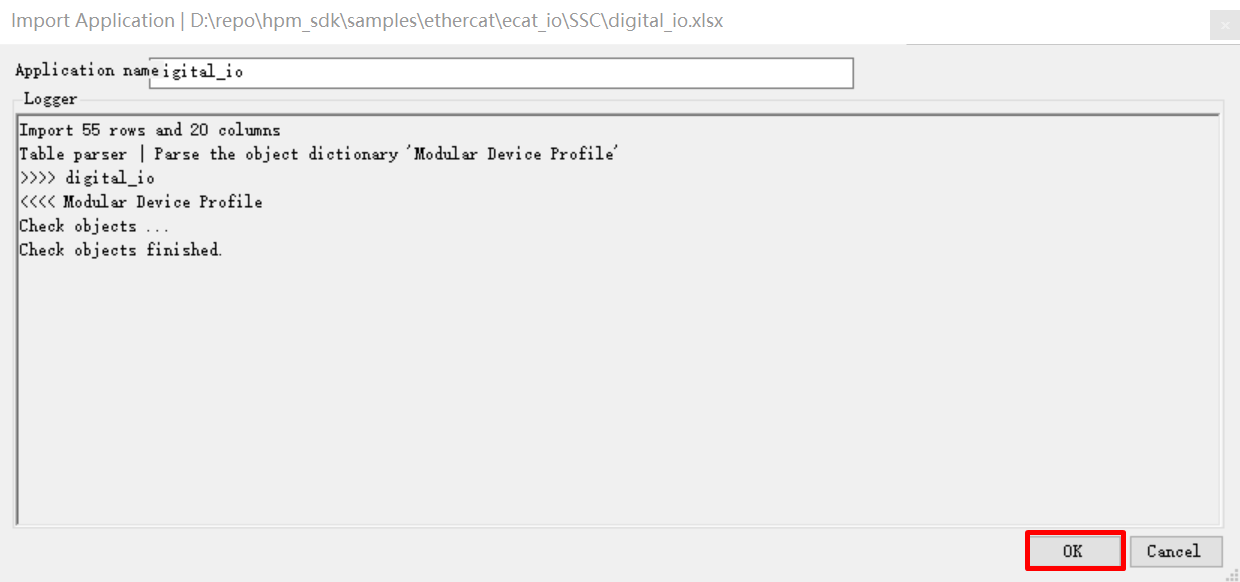
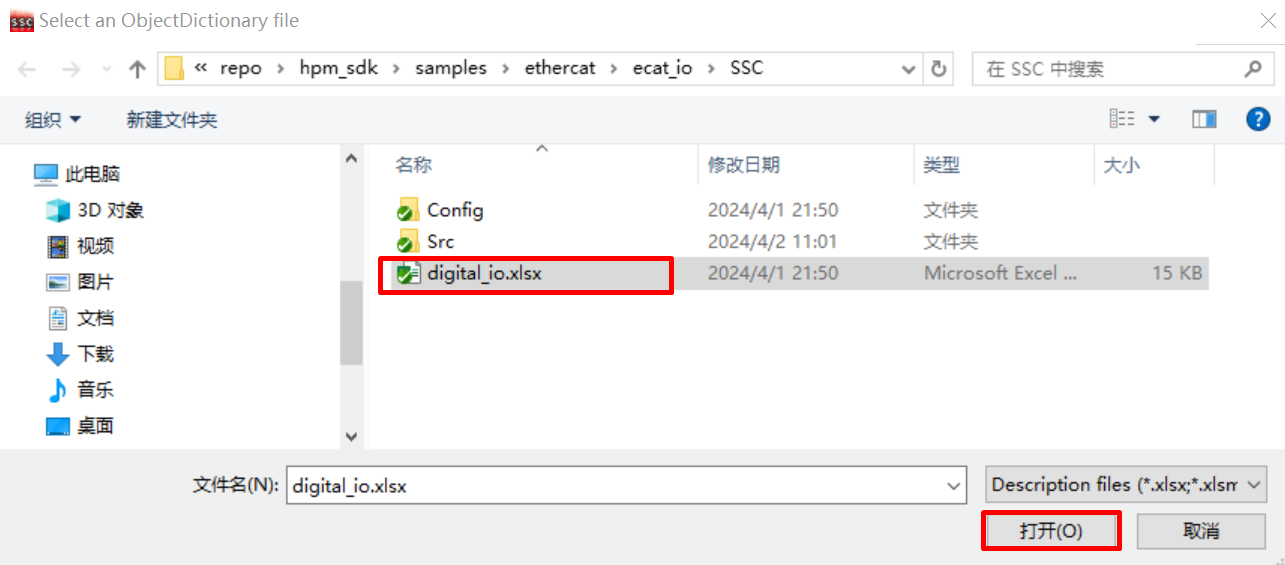 - Click OK
- Click OK
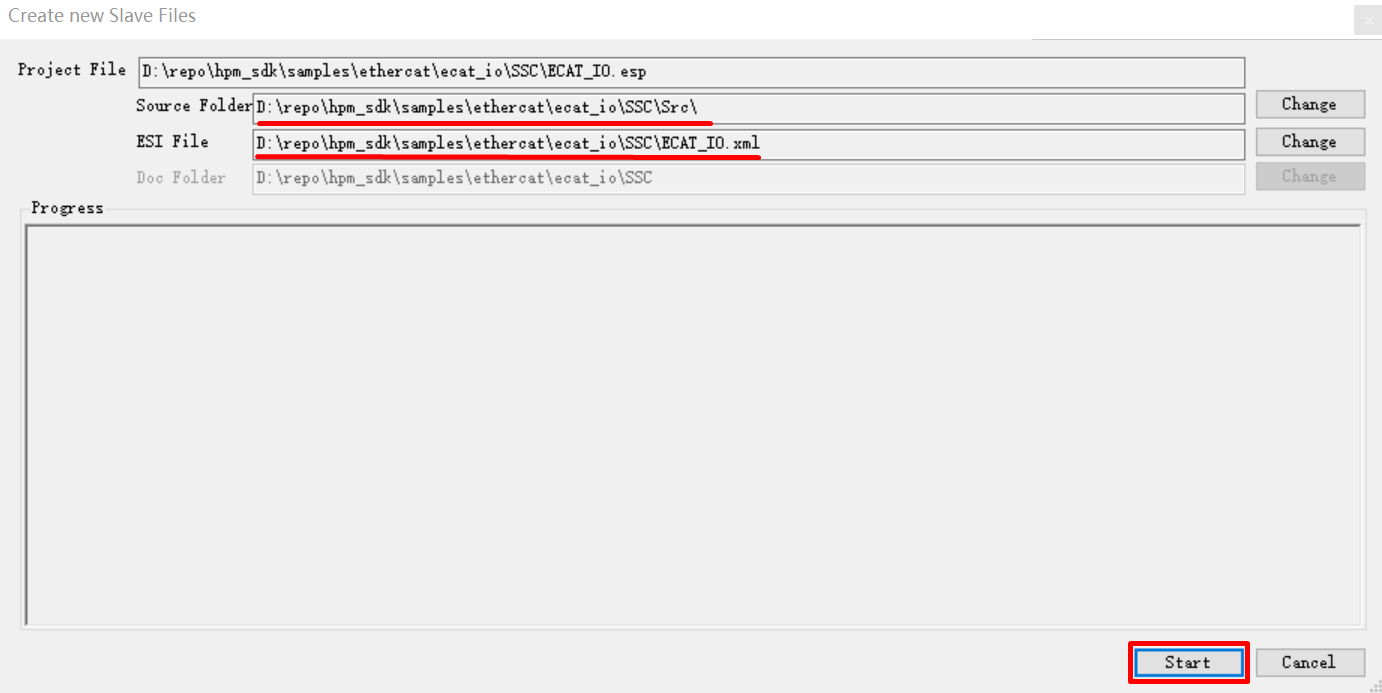
36.3.4.4. 4.4 Create slave stack files
Click Project->Create new Slave Files
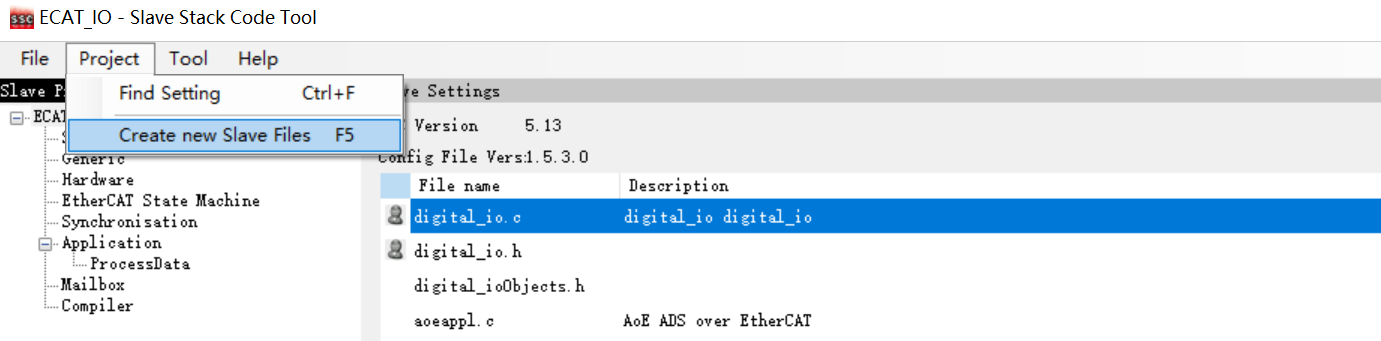
Specify the output path, the output source folder have to set to <ecat_io sample path>/SSC/Src, if other path, have to copy generated SRC folder to <ecat_io sample path>/SSC/Src
36.3.4.5. 4.5 SSC code change
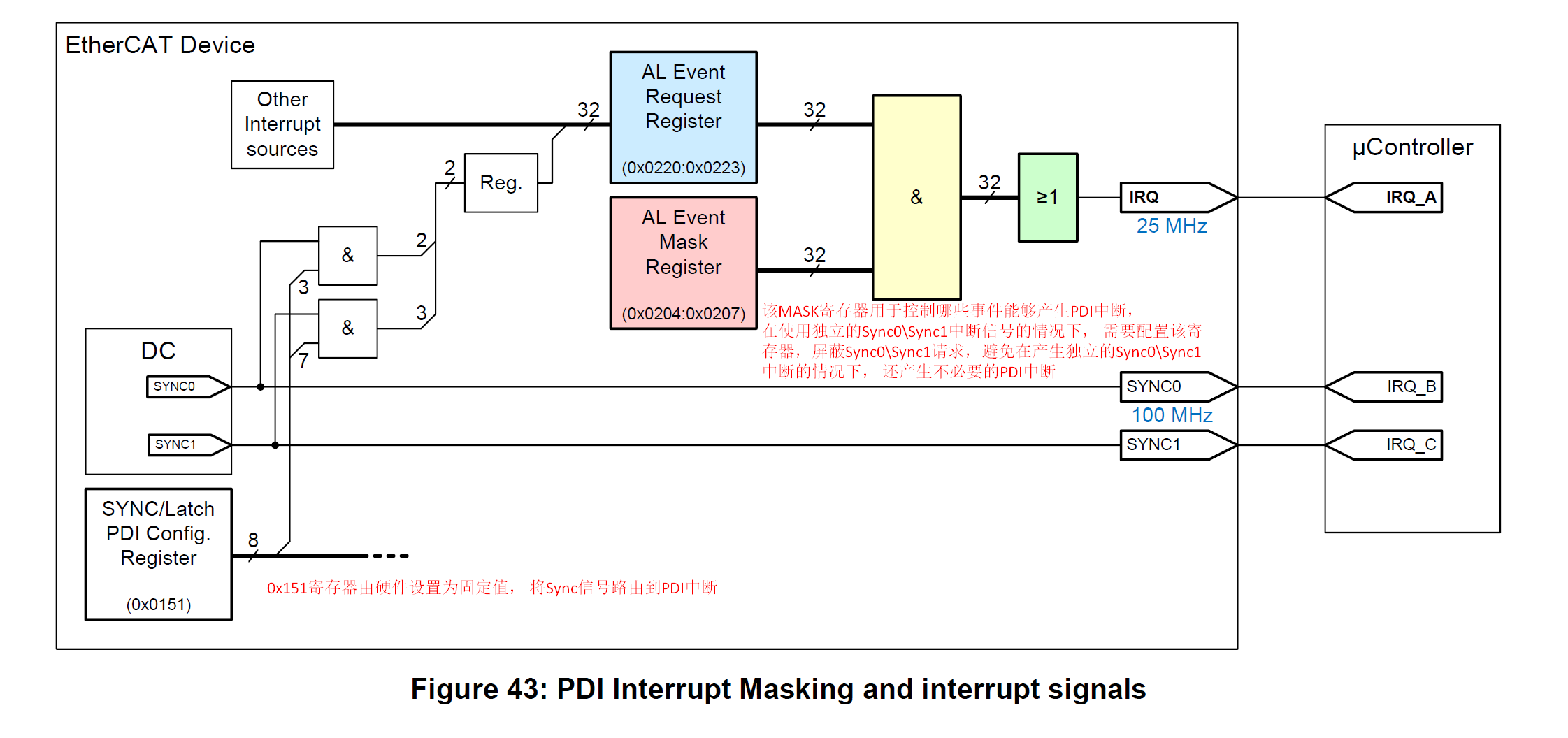
ESC IP supports generating independent Sync0 \ Sync1 interrupts, and Sync0 \ Sync1 requests can also trigger PDI interrupts. To avoid unnecessary PDI interrupts triggered by Sync0 \ Sync1 requests when using independent Sync0 \ Sync1 interrupts, AL Event Mask Register (0x204) needs to be set for masking
Execute in the command line window under the SSC directory:patch -d Src < ssc_pdi_mask.patch
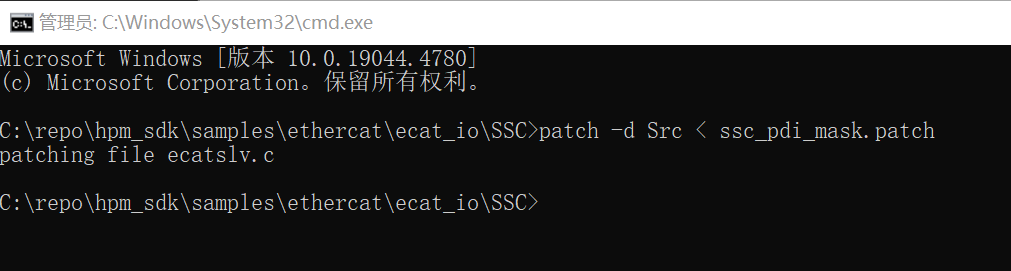
Note:If the patch command is not installed on your PC, you will need to install ver. 2.5.9 or a laterversion of GNU patch. If it is already installed, skip this step. Download the patch command (currently ver. 2.5.9) from the following Web page and store “patch.exe” in a folder on a path that makes the file executable from the command prompt. http://gnuwin32.sourceforge.net/packages/patch.htm
36.3.5. 5. TwinCAT Project setting
36.3.5.1. 5.1. Add ESI file
Copy the generated (ECAT-IO.xml) by SSC tool in previous steps to TwinCAT(C:\TwinCAT\3.1\Config\Io\EtherCAT).
36.3.5.2. 5.2 Create Project
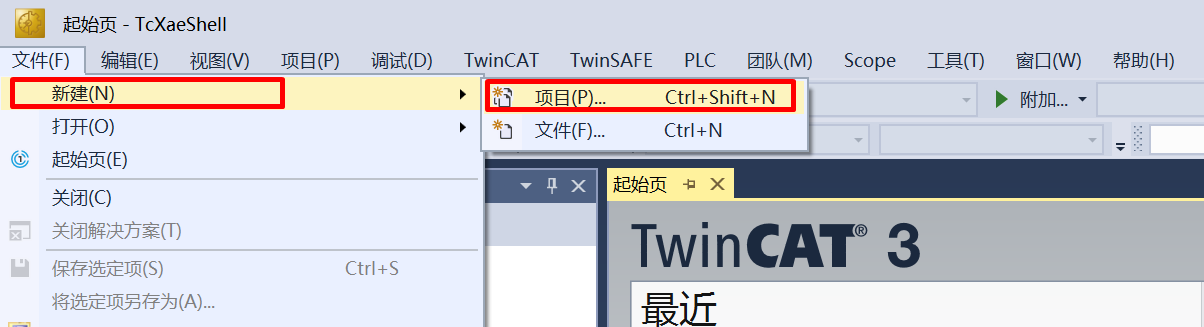
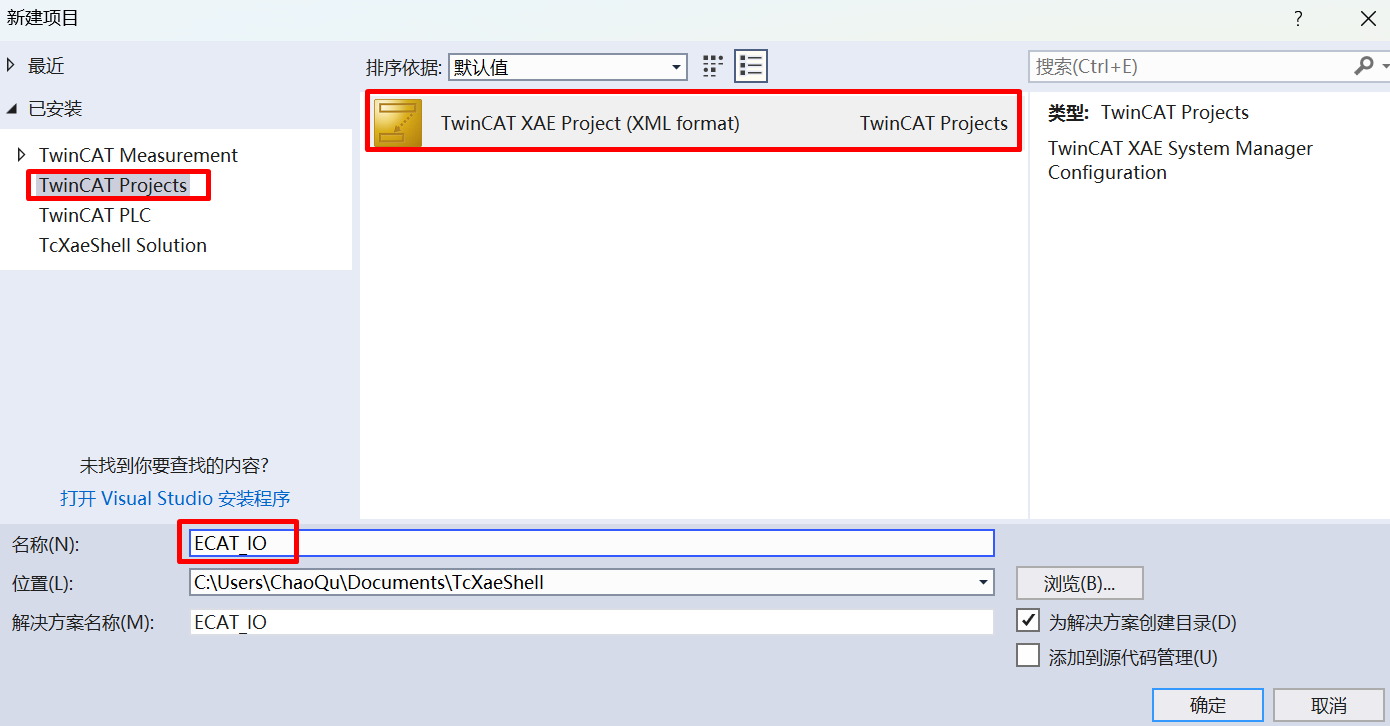
Open TwinCAT,click File->New->Project
Click TwinCAT Project, after naming, click OK
36.3.5.3. 5.3 Software Configuration
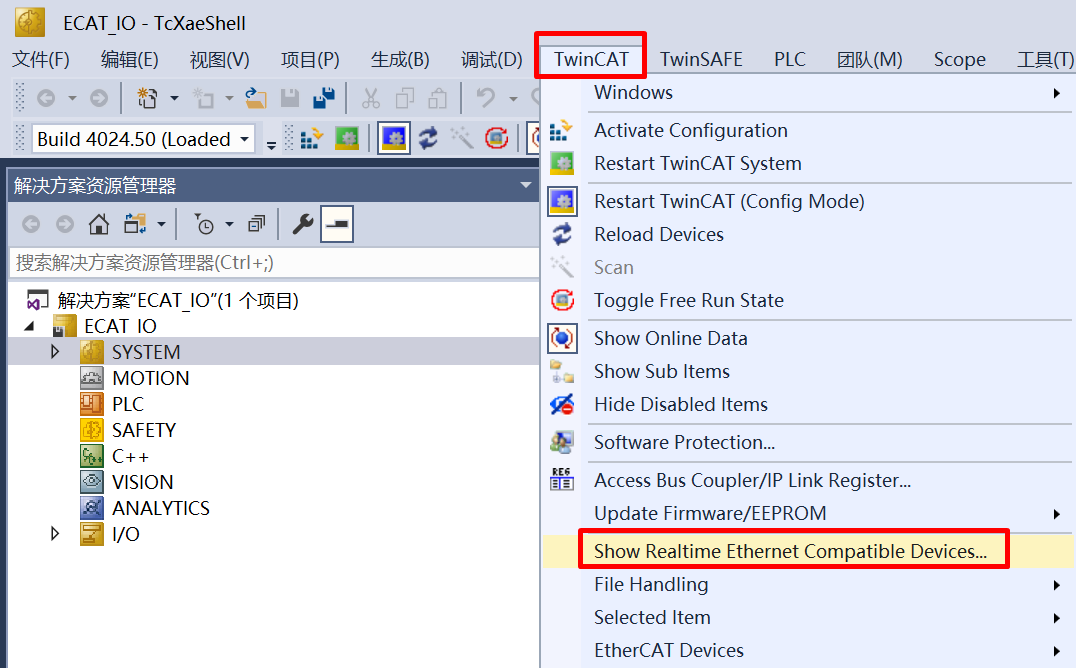
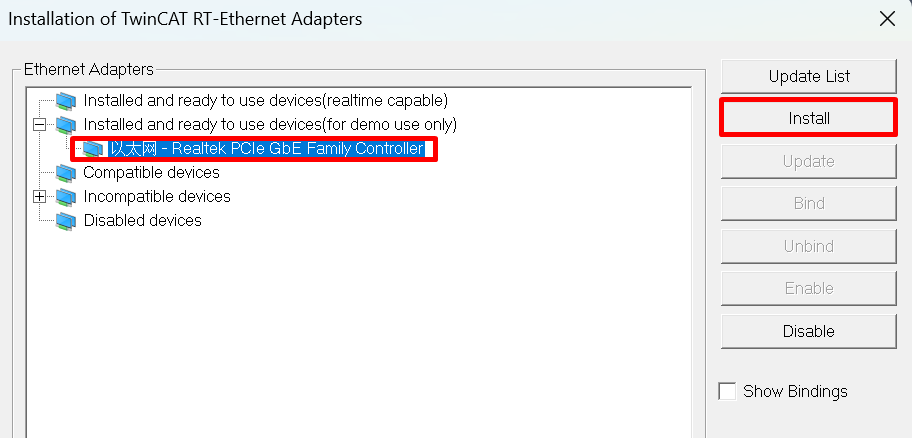
Update network card driver (required for first use)
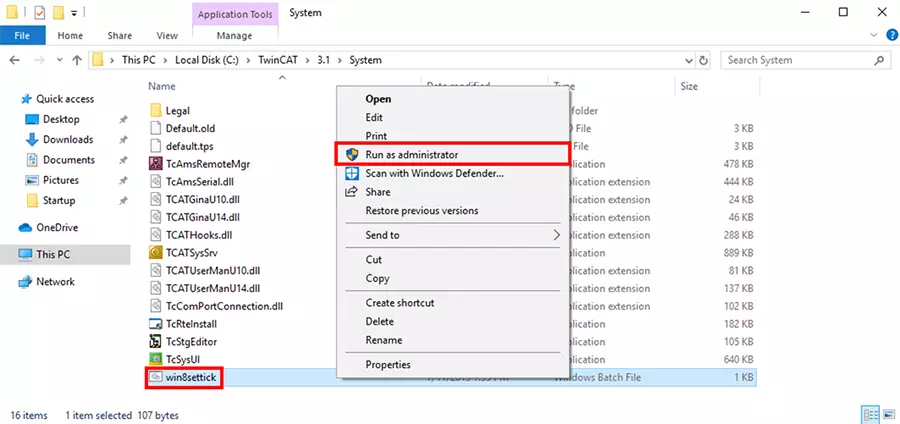
clock setting The TwinCAT may report the following error during runtime, win8settick.bat needs to run with administrator privileges(C:\TwinCAT\3.1\System\win8settick.bat)
Init4\RTime:Start Interrupt:Ticker started >> AdsWarning4115 (0x1013,RTIME:system clock setup failed)
36.3.5.4. 5.4 Scan device
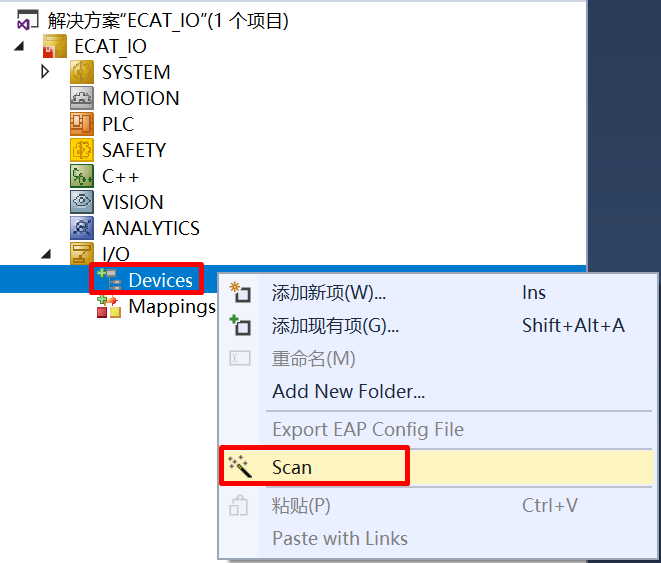
Right click Device, then click Scan
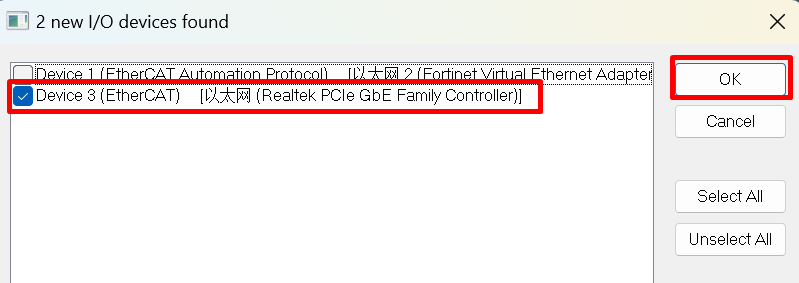
Choose correct network
36.3.5.5. 5.5 Update EEPROM context
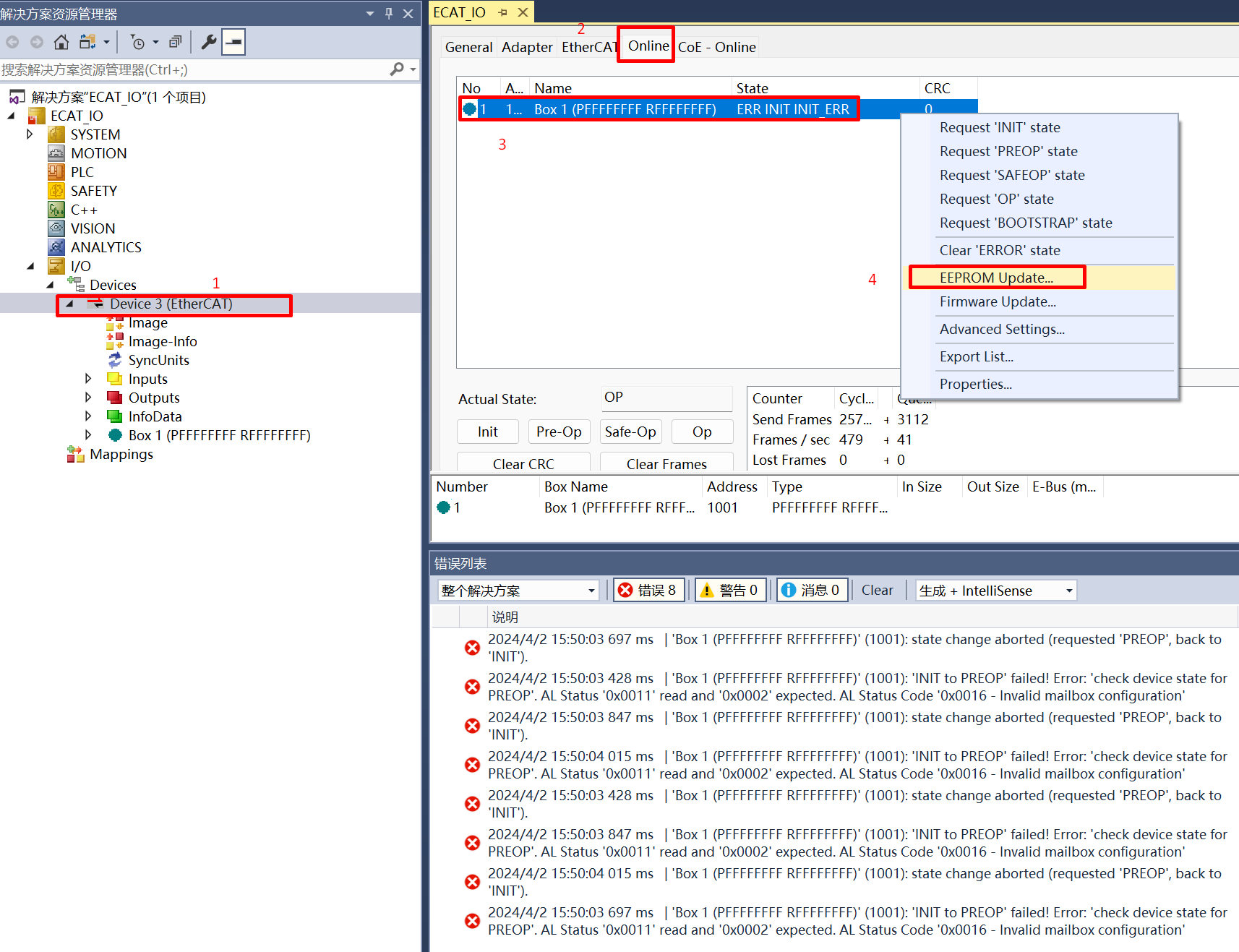
Double click on the scanned device, click Online, right clickBox, then click EEPROM Update。
For cases where the EEPROM content is empty, it is not possible to find a matching Box when scanning the device. In this case, it is necessary to update the EEPROM content。
In the case where EEPROM content is empty, When ESC is powered on to load EEPROM data, a checksum error will occur, which will cause PDI to not work. At this time, EtherCAT communication is possible and EEPROM content can be updated through the main station.
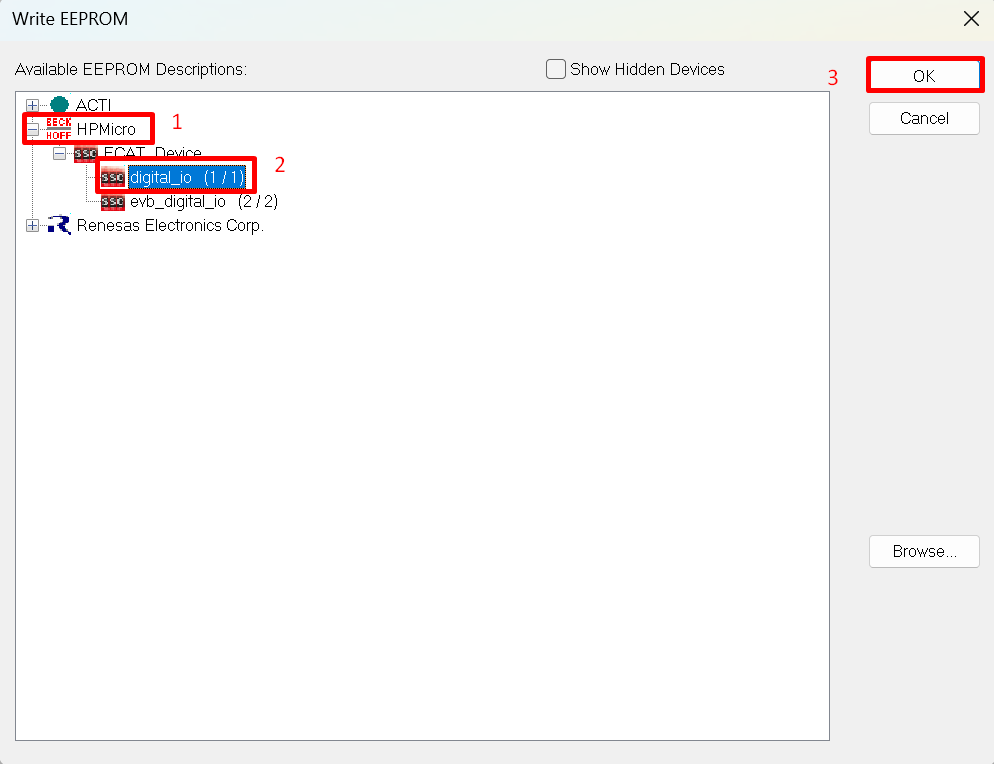
chosse correct files, click OK, wait for completion
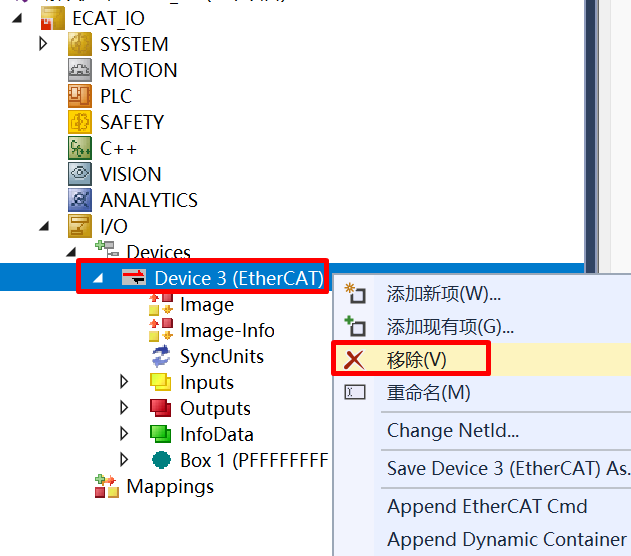
Reset the board, delete the scanned devices and rescanning
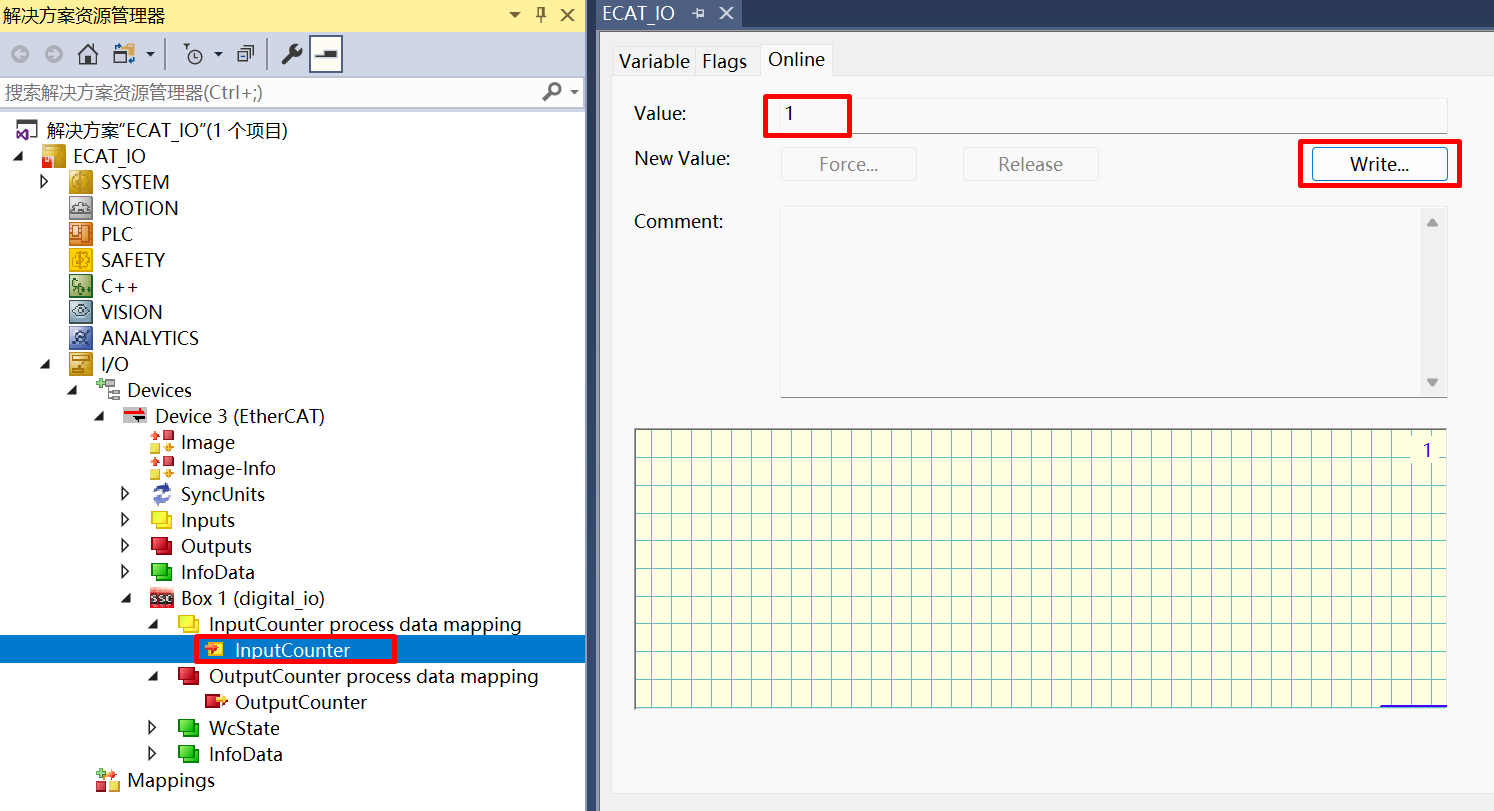
36.3.5.6. 5.6 IO Control
Input IO, change DIP switch, “InputCounter” value change in TwinCAT
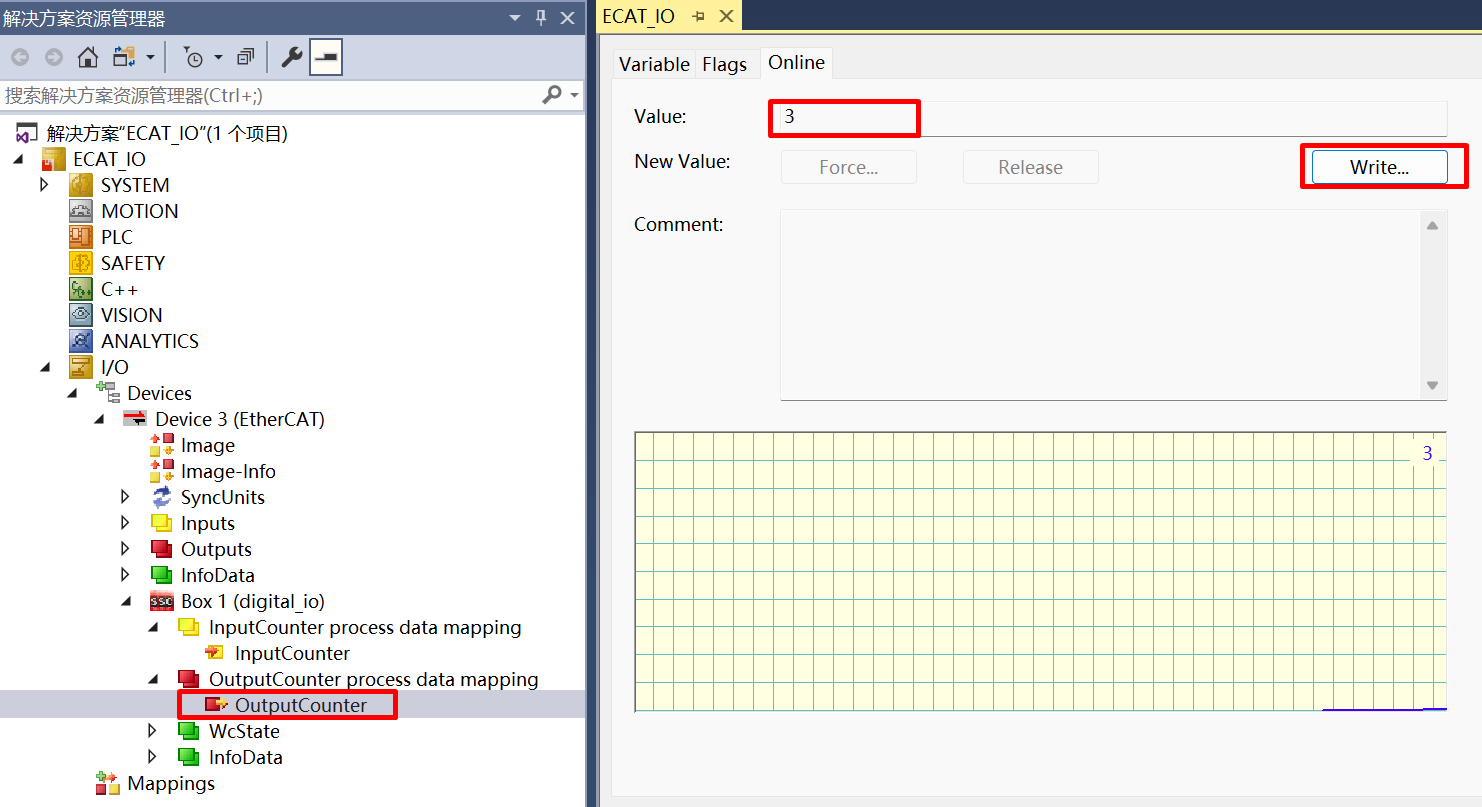
Output IO, write “OutputCounter” value in Twincat, Output LED change
Check RUN LED and ERR_LED status
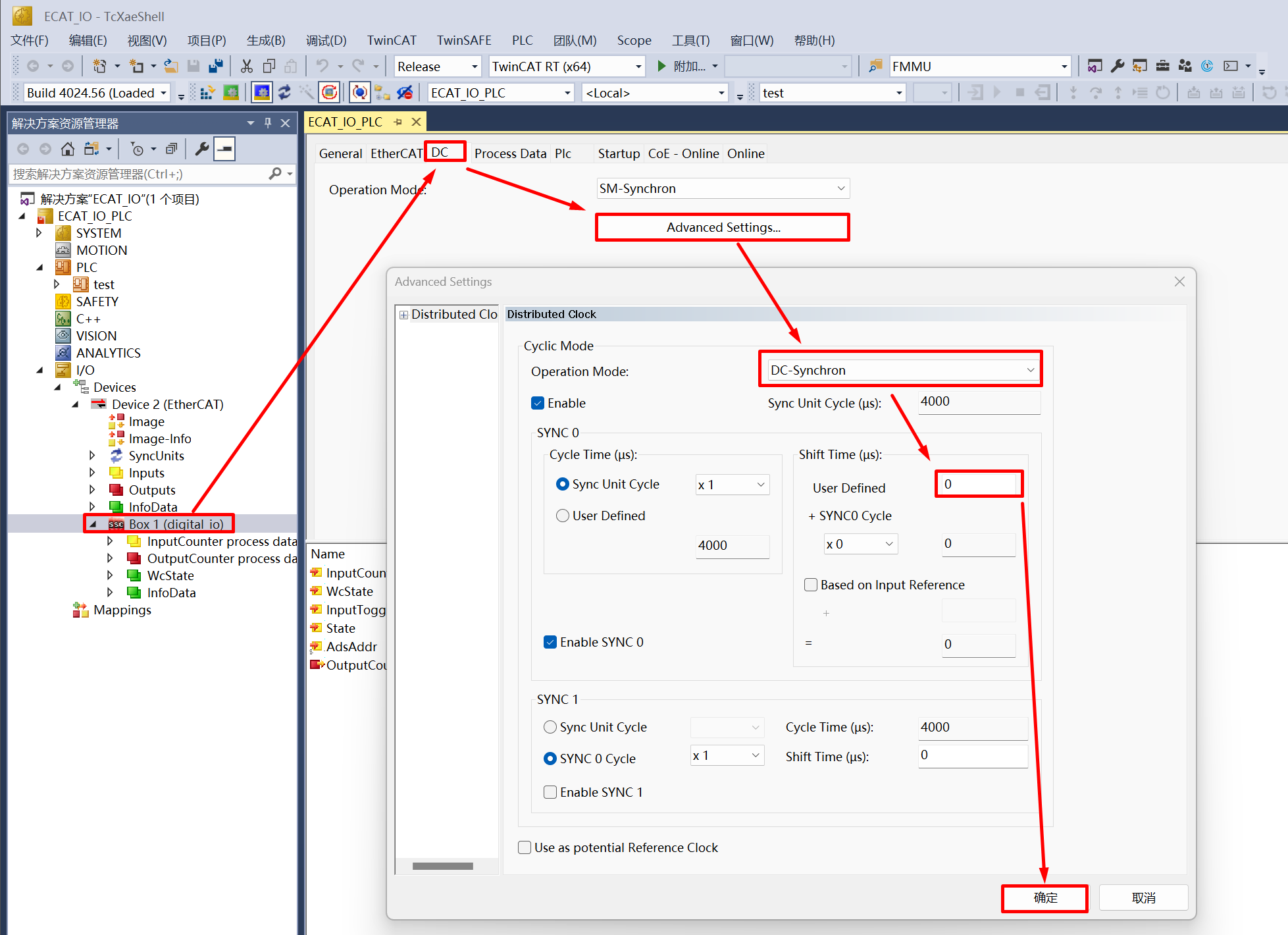
36.3.5.7. 5.7 DC setting
Set the synchronization mode of the slave station, where you can set an individual Shift Time for the slave station (Shift Time is used to ensure that all slave stations receive data from the master station before the DC sync event)
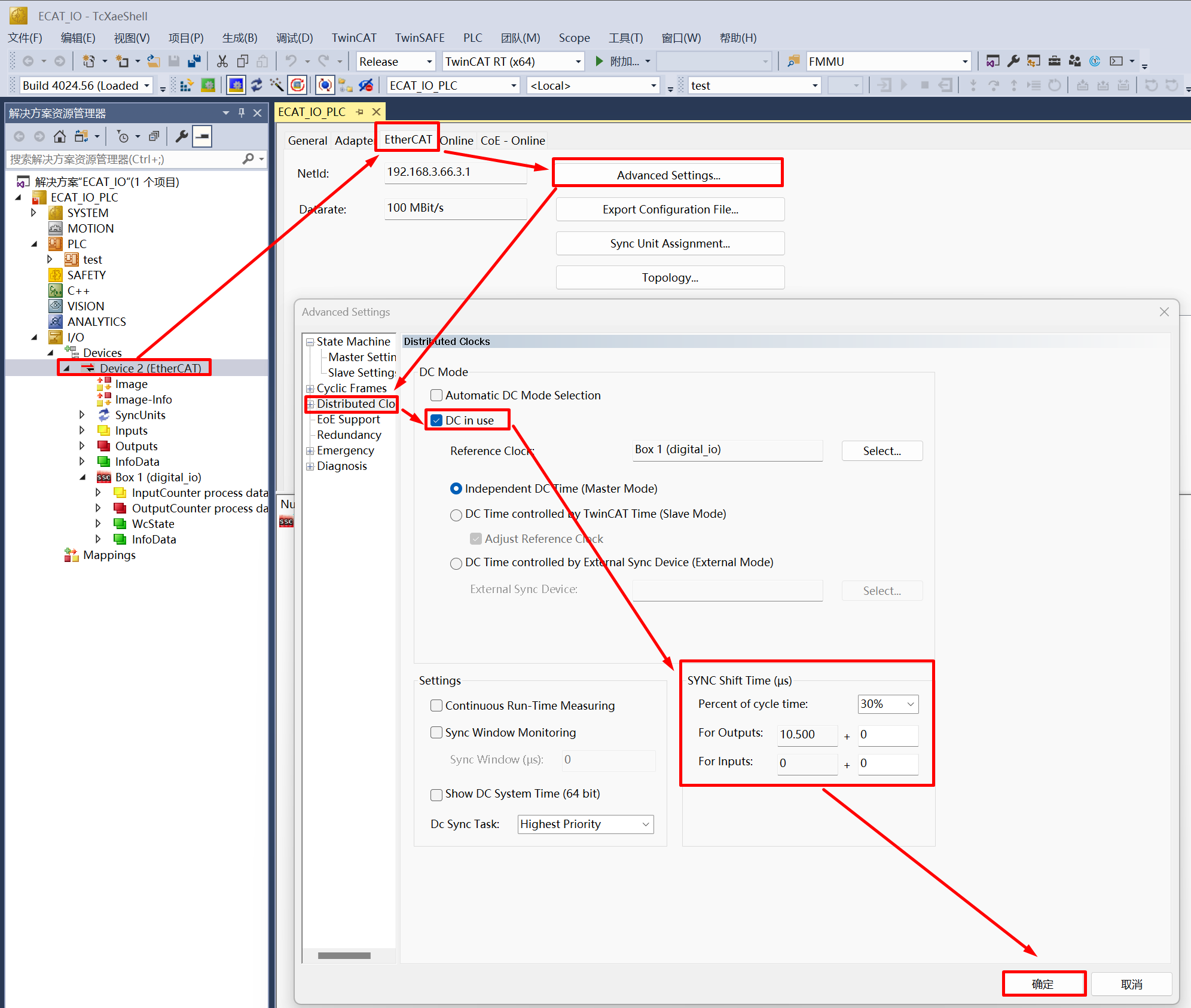
Set the synchronization mode of the master station, through the Sync Shift Time of the master station, you can set the shift time for all DC sync mode slave stations (usually 20%~30% of the Sync Unit Cycle time), Actual Shift Time of a single slave station = Shift Time set by the master station + Shift Time set by the slave station
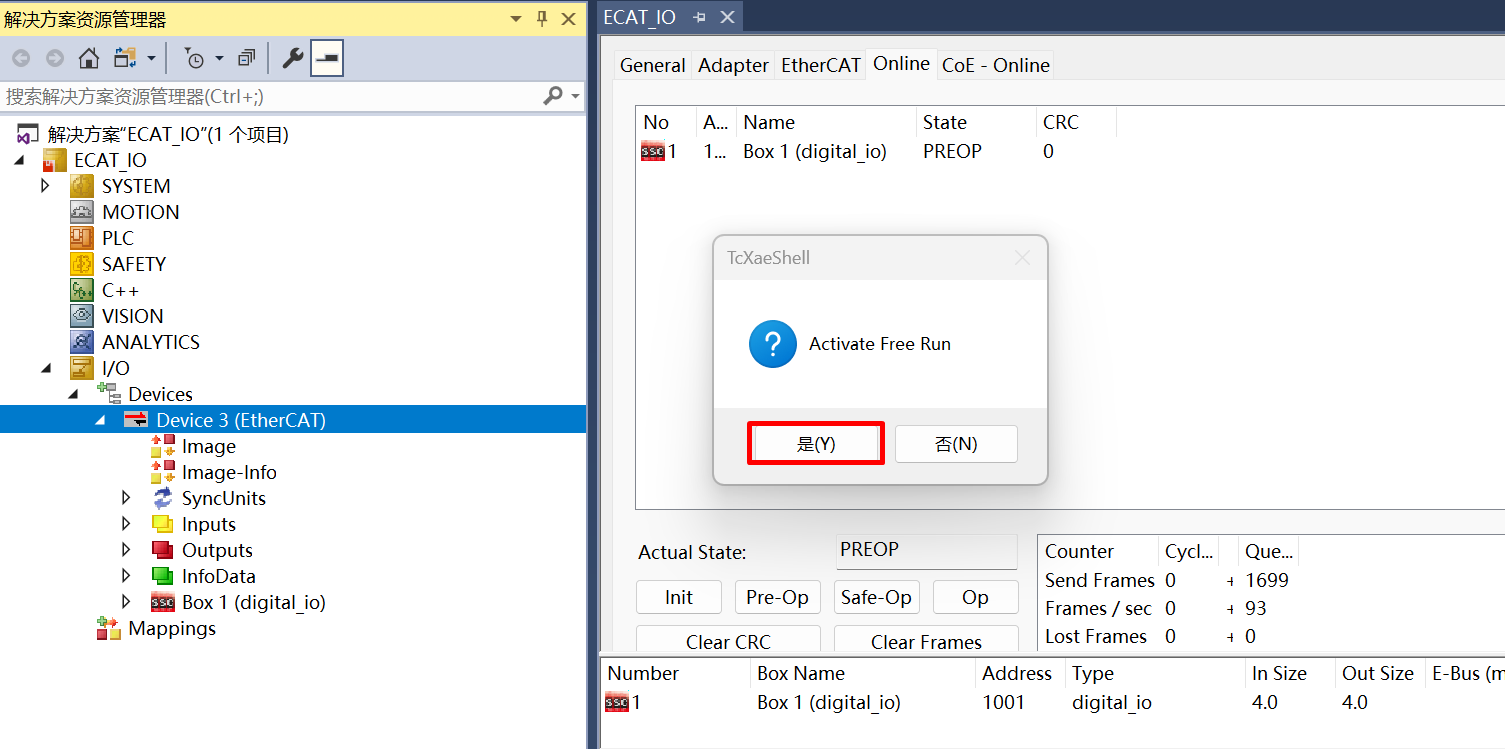
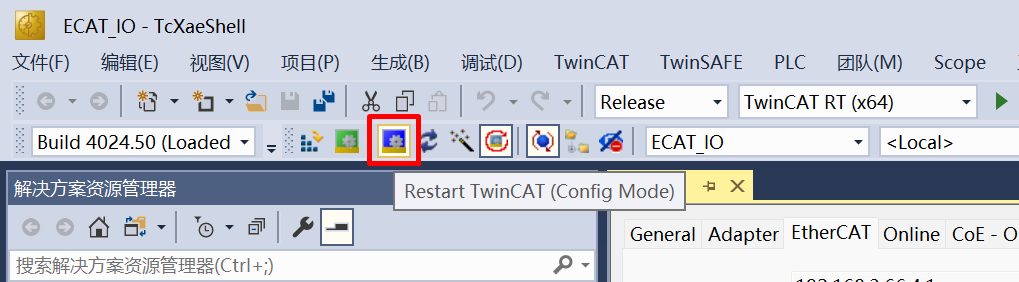
Click Restart TwinCAT (Config Mode), slave stations can enter OP state under DC sync mode. In actual use, tasks should be created in TwinCAT (such as PLC task or NC Task), set the synchronization between slave and master station tasks, activate the configuration, and enter Run Mode to ensure synchronization performance, working under DC sync mode
36.3.6. 6. Running the example
After the project is running correctly, the serial terminal will output the following information, and the input-output IO status corresponds to the TwinCAT project configuration:
EtherCAT IO sample
EEPROM loading with checksum error.
EtherCAT communication is possible even if the EEPROM is blank(checksum error),
but PDI not operational, please update eeprom context.
or
EtherCAT IO sample
EEPROM loading successful, no checksum error.