2. PPI Component
2.1. PPI 资源特性介绍
支持4个CS端口,每个CS端口可以单独配置:地址区间(基地址需1MB对齐)、端口位宽 (支持 8/16/32 位) 和命令序列 (命令的起始/结束索引)
有32位数据/地址总线,支持:32位数据 + 32位地址(复用模式)、16位数据 + 32位地址(复用模式)、 8位数据 + 32位数据(复用模式)、16位数据 + 16位地址(非复用模式)、8位数据 + 24位地址(非复用模式)
有4个有效字节选择端口(DM信号,用于SRAM的UB/LB等信号)
有8个控制线(可配置为SRAM的WE/OE/ADV等信号)
有1个时钟线输出(支持时钟始终输出和跟随指令序列输出)

2.2. PPI 配置介绍
CS配置 CS配置结构体如下:
typedef struct { ppi_port_size_t port_size; uint16_t addr_start_high_12bits; /* address space: 0xF8000000 ~ 0xFFFFFFFF */ uint16_t addr_end_high_12bits; /* address space: 0xF8000000 ~ 0xFFFFFFFF */ uint16_t addr_mask; bool sync_clk_en; uint8_t sync_clk_sel; uint8_t interval_cycle; uint8_t rcmd_start0; uint8_t rcmd_end0; uint8_t rcmd_start1; uint8_t rcmd_end1; uint8_t wcmd_start0; uint8_t wcmd_end0; uint8_t wcmd_start1; uint8_t wcmd_end1; #if defined(HPM_IP_FEATURE_PPI_DM_POLARITY_EACH_CS) && HPM_IP_FEATURE_PPI_DM_POLARITY_EACH_CS ppi_dm_valid_polarity_t dm_polarity; #endif } ppi_cs_pin_config_t; /**< ppi_cs_pin_config_t */
PPI 的地址空间为0xF8000000 ~ 0xFFFFFFFF,默认为Noncacheable属性,可通过配置PMP为Cacheable属性。需要注意的是,PPI内存地址空间的Cacheable属性仅支持: MEM_TYPE_MEM_WB_READ_WRITE_ALLOC - Memory, Write-back, Write-Allocate, Read-Allocate。
port_size 为端口位宽, addr_start_high_12bits 和 addr_end_high_12bits 分别为起始地址的高12位和结束地址的高12位, addr_mask 为高16位地址掩码。
sync_clk_en 为是否同步时钟使能, sync_clk_sel 为CS输出有效电平的时刻选择(范围为 0 ~ clkpin_cfg.cycle), interval_cycle 为命令间隔时间(单位为系统时钟周期)。
rcmd_start0 和 rcmd_end0 为首条读命令的起始/结束索引, wcmd_start0 和 wcmd_end0 为首条写命令的起始/结束索引; rcmd_start1 和 rcmd_end1 为第二条及后续读命令的起始/结束索引, wcmd_start1 和 wcmd_end1 为第二条及后续写命令的起始/结束索引。例如,有些支持 burst 传输的设备,首次访问和后续访问时序会不同,所以每个设备可以配置不同的首次访问和后续访问的命令序列。起始/结束索引对应为64个命令字的索引,范围为0 ~ 63。
CMD命令字配置 - 一共有64个命令字,4个CS共用。 - 每次数据传输,可以切成若干片段,每个片段由一个命令字描述。例如,在如下的《PPI组件介绍》章节中,读/写指令均分为4个片段。 - 针对每个片段,可配置该片段的持续时间(cmd_cycle)、CS引脚的输出电平(cs_pin_value)、DQ引脚功能(ad_func_sel,数据/地址,1个字节为一组)、DQ引脚方向(ad_pin_dir,输入/输出,1个字节为一组)、输出字节的来源(byte_sel)、8根控制线的电平(ctrl_pin_value)、时钟输出使能(clk_output,时钟引脚在cmd控制输出模式有效),CMD命令字结构体如下:
typedef struct { bool cs_pin_value; bool clk_output; uint8_t cmd_cycle; ppi_ad_func_t ad_func_sel[4]; ppi_ad_pin_dir_t ad_pin_dir[4]; ppi_byte_sel_t byte_sel[4]; bool ctrl_pin_value[8]; } ppi_cmd_config_t; /**< ppi_cmd_config_t */
控制引脚配置 - 一共有8个控制信号引脚。 - 可以独立配置每个控制引脚的方向和极性,配置的API如下:
static inline void ppi_config_ctrl_pin_polarity(PPI_Type *ppi, uint8_t index, ppi_ctrl_polarity_t pol); static inline void ppi_set_ctrl_pin_dir(PPI_Type *ppi, uint8_t index, ppi_ctrl_pin_dir_t dir);
时钟引脚配置 - 一共有1 个时钟信号输出。 - 时钟有2种工作模式:(1)始终输出;(2)由CMD控制输出,即ppi_cmd_config.clk_output控制时钟输出。 - 时钟引脚配置的结构体如下
typedef struct { uint8_t cycle_num; uint8_t high_num; uint8_t low_num; ppi_clk_output_mode_t mode; bool revert; } ppi_clk_pin_config_t; /**< ppi_clk_pin_config_t */
其中, cycle_num 、 high_num 、 low_num 三个参数控制输出时钟的周期, mode 配置工作模式, revert 控制时钟输出是否取反。
2.3. PPI 组件介绍
目前PPI组件实现了异步SRAM的读写时序,支持地址/数据复用模式和非复用模式,各模式的引脚对应如下:
AD复用模式 |
数据线 |
地址线 |
地址锁存器 |
|---|---|---|---|
32位数据 + 32位地址 |
D0 - D31 : DQ0 - DQ31 |
A0 - A31 : DQ0 - DQ31 |
DQ0 - DQ31 需要地址锁存器 |
16位数据 + 32位地址 |
D0 - D15 : DQ0 - DQ15 |
A0 - A31 : DQ0 - DQ31 |
DQ0 - DQ15 需要地址锁存器,DQ16 - DQ31 无需地址锁存器 |
8位数据 + 32位地址 |
D0 - D7 : DQ0 - DQ7 |
A0 - A31 : DQ0 - DQ31 |
DQ0 - DQ7 需要地址锁存器,DQ8 - DQ31 无需地址锁存器 |
AD非复用模式 |
数据线 |
地址线 |
|---|---|---|
16位数据 + 16位地址 |
D0 - D15 : DQ0 - DQ15 |
A0 - A15 : DQ16 - DQ31 |
8位数据 + 24位地址 |
D0 - D7 : DQ0 - DQ7 |
A0 - A23 : DQ8 - DQ31 |
备注:支持DQ引脚信号选择,例如DQ0-7信号选择使用PPI的DQ8-15引脚。
异步SRAM配置的结构体如下:
typedef struct {
uint32_t base_address; /**< external SRAM base address, should be 1MB aligned */
uint32_t size_in_byte; /**< external SRAM size in byte */
ppi_port_size_t port_size; /**< port size */
bool ad_mux_mode; /**< addr and data mux mode */
bool cs_valid_polarity; /**< cs valid polarity */
bool dm_valid_polarity; /**< dm valid polarity */
bool addr_valid_polarity; /**< addr valid polarity */
uint8_t adv_ctrl_pin; /**< adv ctrl pin number, 0 - 7 */
uint8_t rel_ctrl_pin; /**< rel ctrl pin number, 0 - 7 */
uint8_t wel_ctrl_pin; /**< wel ctrl pin number, 0 - 7 */
uint16_t as_in_ns; /**< address setup time */
uint16_t ah_in_ns; /**< address hold time */
uint16_t rel_in_ns; /**< RE low time */
uint16_t reh_in_ns; /**< RE high time */
uint16_t wel_in_ns; /**< WE low time */
uint16_t weh_in_ns; /**< WE high time */
ppi_dq_pins_t dq_sig_sel[4]; /**< dq signal selection.
* dq_sig_sel[0] is signal dq0-7 select ppi dq pins,
* dq_sig_sel[1] is signal dq8-15 select ppi dq pins,
* dq_sig_sel[2] is signal dq16-23 select ppi dq pins,
* dq_sig_sel[3] is signal dq24-31 select ppi dq pins.
*/
} ppi_async_sram_config_t;
对应的读写时序图为:
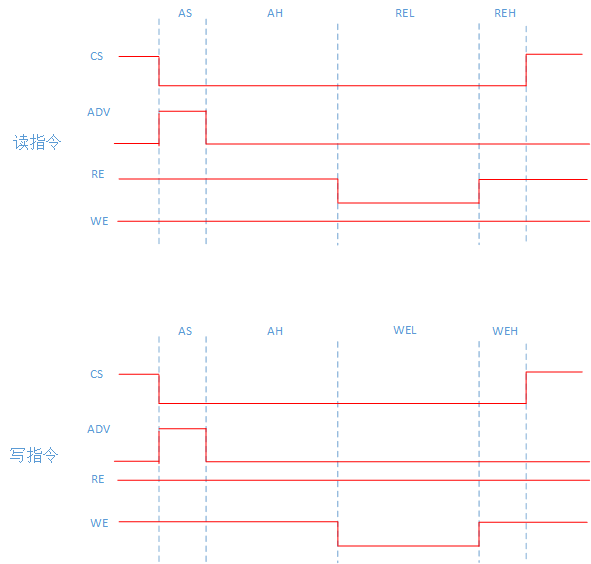
其中,CS为片选信号,ADV、RE、WE为控制信号(在8个控制线中进行选择)。cs、adv、dm的有效极性可以进行配置。
PPI组件配置异步SRAM的API如下,每个CS配置会占用8个CMD命令字,故cmd_start_index需要设置为8的倍数,例如0、8、16、24等。
/**
* @brief config async sram
*
* @param[in] ppi PPI base address
* @param[in] cs_index cs index, value: 0 - 3
* @param[in] cmd_index cmd start index, should be a multiple of 8, such as 0, 8, 16, 24 ...
* @param[in] config async sram config structure pointer, @ref ppi_async_sram_config_t
*/
void ppi_config_async_sram(PPI_Type *ppi, uint8_t cs_index, uint8_t cmd_start_index, ppi_async_sram_config_t *config);