12.1. ECAT_CiA402
12.1.1. 1. 概述
ECAT_CIA402示例演示使用ESC外设, 基于ETG从站协议栈代码(SSC)实现CANOPEN CiA402协议控制电机的功能。
该例程程序支持对ESC的EEPROM数据进行初始化,能够简化更新ESC的EEPROM的步骤。
如果程序代码中包含由SSC Tool生成的EEPROM数据(eeprom.h), 会检查ESC的EEPROM中存储的数据并根据条件进行更新。
如果EEPROM中的EtherCAT Slave Controller Configuration Area(前8个Word)的数据checksum校验失败,则会使用eeprom.h中的数据初始化EEPROM。
如果EEPROM中的EtherCAT Slave Controller Configuration Area(前8个Word)的数据checksum校验成功,则会进一步校验EEPROM数据中的Product Code和Revision Code。
当Product Code不同或eeprom.h中的Revision Number大于当前已经存储的EEPROM数据的Revision Number时,则会使用eeprom.h中的数据初始化EEPROM。
该方法能够解决初次使用时EEPROM为空情况下checksum校验失败的问题,能够对EEPROM进行初始化。在程序升级阶段,新的程序代码包含的eeprom.h中的Revision Number大于当前已经存储的EEPROM数据的Revision Number时,会使用新程序中的eeprom.h初始化EEPROM,而无需通过主站工具如TwinCAT等去更新EEPROM。
12.1.2. 2. 准备
12.1.3. 3. 工程设置
12.1.3.1. 3.1 使用Flash模拟EEPROM
请参照ECAT_IO的README
注意 : 使用FLASH模拟EEPROM功能时,需要为FLASH_EEPROM内容分配合适的flash空间, 避免与其他的flash内容产生冲突。
12.1.3.2. 3.2 使用虚拟电机
默认使用实际电机进行运动控制,如果需要使用虚拟电机, 在文件`CMakeLists.txt`中, 设置”set(CONFIG_CIA402_USING_ACTUAL_MOTOR 0)”。
12.1.4. 4. 生成从站协议栈代码
由于许可问题, HPM_SDK不提供EtherCAT从站协议栈代码(SSC), 用户须从倍福官网下载SSC Tool并生成从站协议栈代码。
12.1.4.1. 4.1. 下载SSC Tool
请参照ECAT_IO的README
12.1.4.2. 4.2 SSC Tool中导入配置文件
请参考ECAT_IO的README描述, 配置文件路径为: <hpm_sdk>/samples/ethercat/ecat_foe/SSC/Config/HPM_ECAT_CIA402_Config.xml
12.1.4.3. 4.3 SSC Tool生成协议栈代码
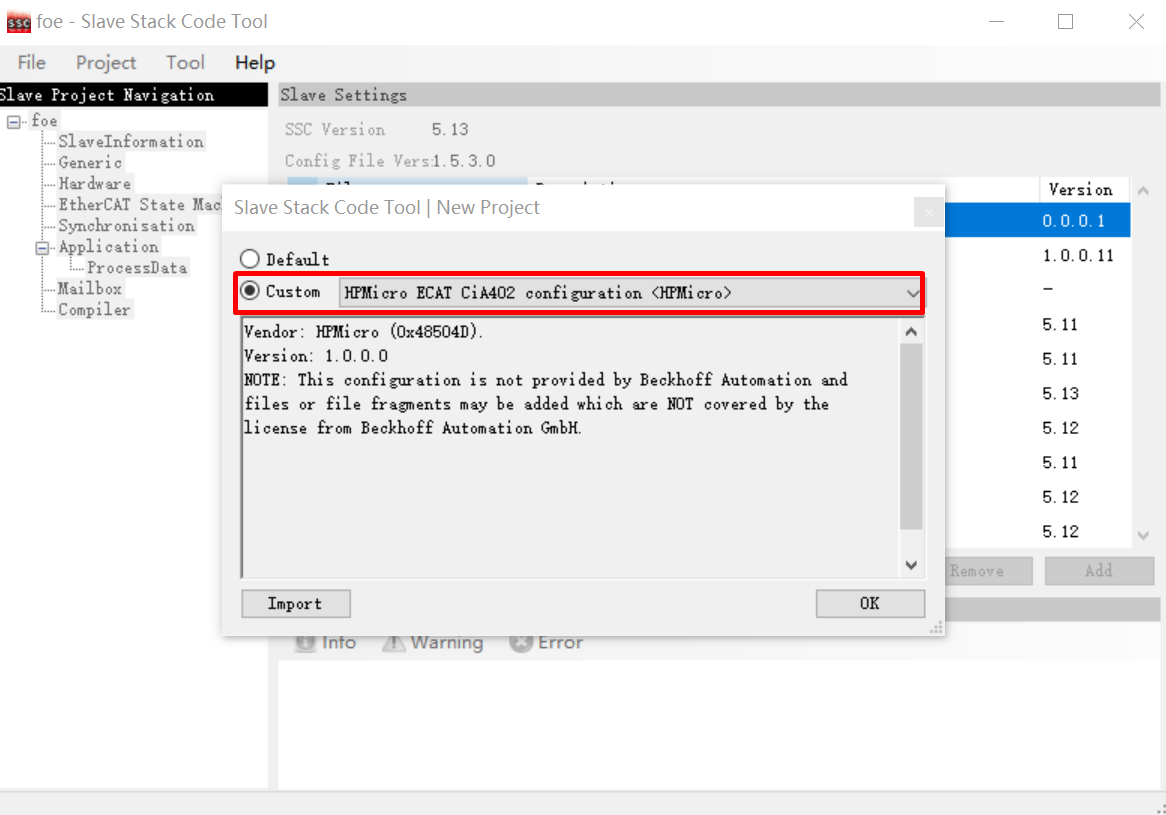
创建新工程, 选择指定的配置文件
指定输出路径,生成协议栈代码
12.1.4.4. 4.4 SSC协议栈代码修改
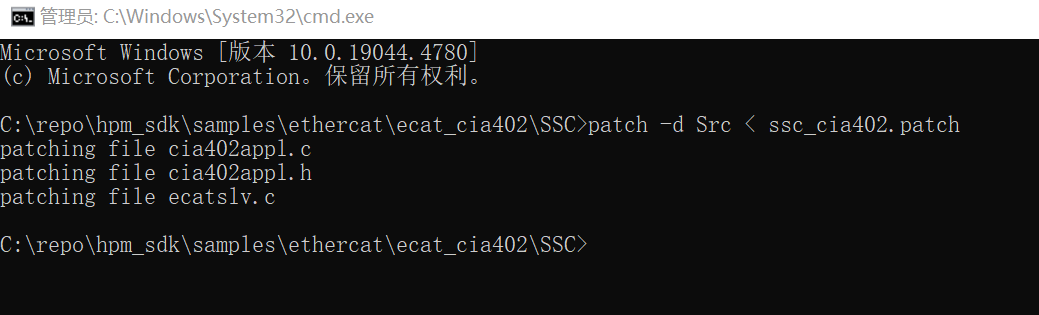
通过打patch的方式添加电机控制相关代码到SSC生成的代码。 在SSC目录下的命令行窗口执行:patch -d Src < ssc_cia402.patch
注意 :如果你的电脑上没有安装patch命令,你需要安装2.5.9版或更高版本的GNU patch。如果已安装,请跳过此步骤。从 网站 下载patch命令(当前版本为2.5.9),并将”patch.exe”的安装路径添加到系统环境变量中以便能在命令行窗口中执行patch命令。
12.1.5. 5. TwinCAT工程设置
12.1.5.1. 5.1. 添加ESI文件
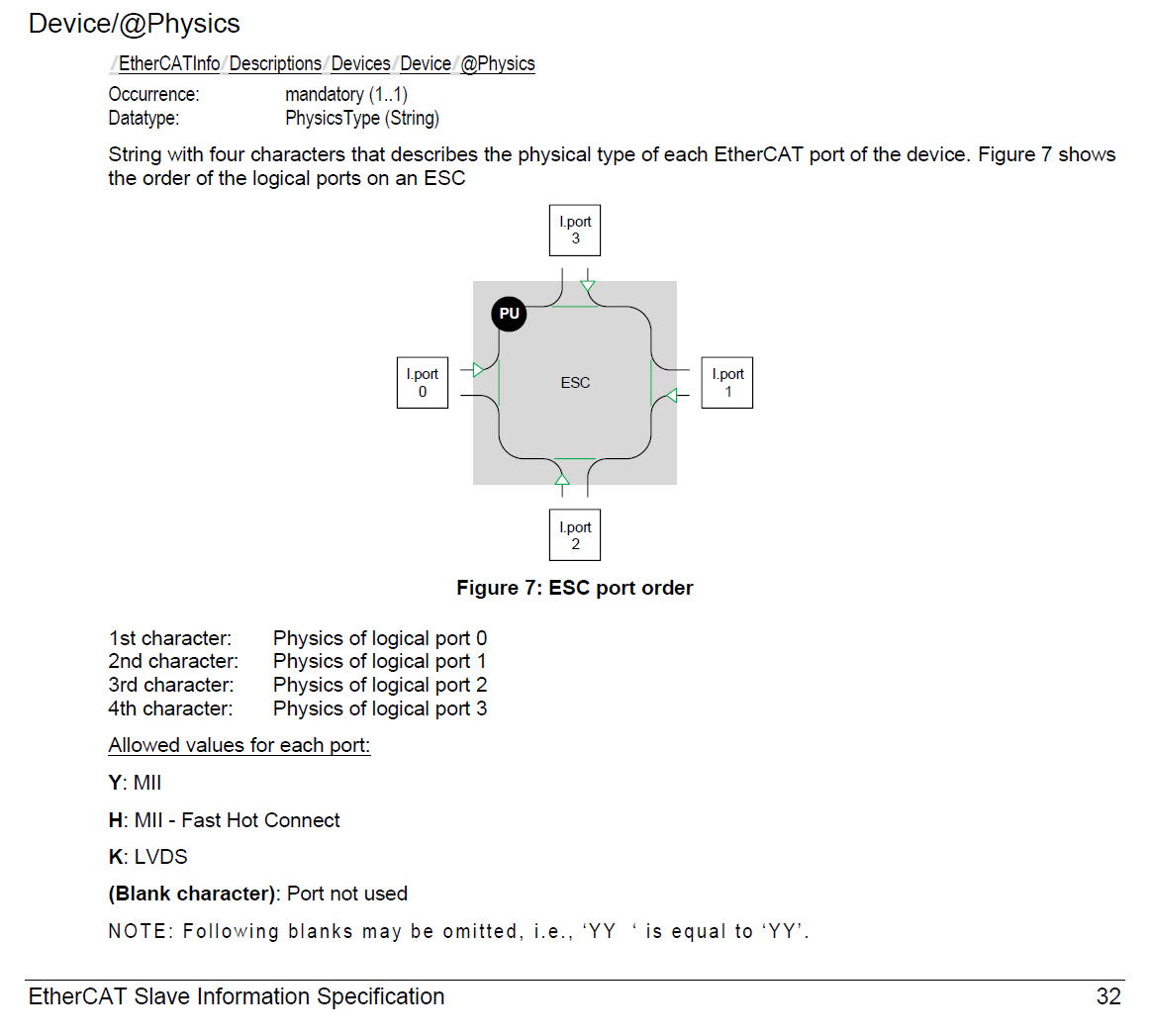
请根据实际硬件端口数目修改SSC工具生成的ESI文件中的设备的属性(<Device Physics=”YY”>), 默认生成的属性为”YY”,表示实现了Port0和Port1两个端口。如实际实现了Port0, Port1和Port2三个端口,请手动修改属性为”YYY”。
将ESI文件复制到TwinCAT的安装目录下(如: C:/TwinCAT/3.1/Config/Io/EtherCAT )。
12.1.5.2. 5.2 创建工程
请参照ECAT_IO的README
12.1.5.3. 5.3 软件配置
请参照ECAT_IO的README
12.1.5.4. 5.4 扫描设备
请参照ECAT_IO的README
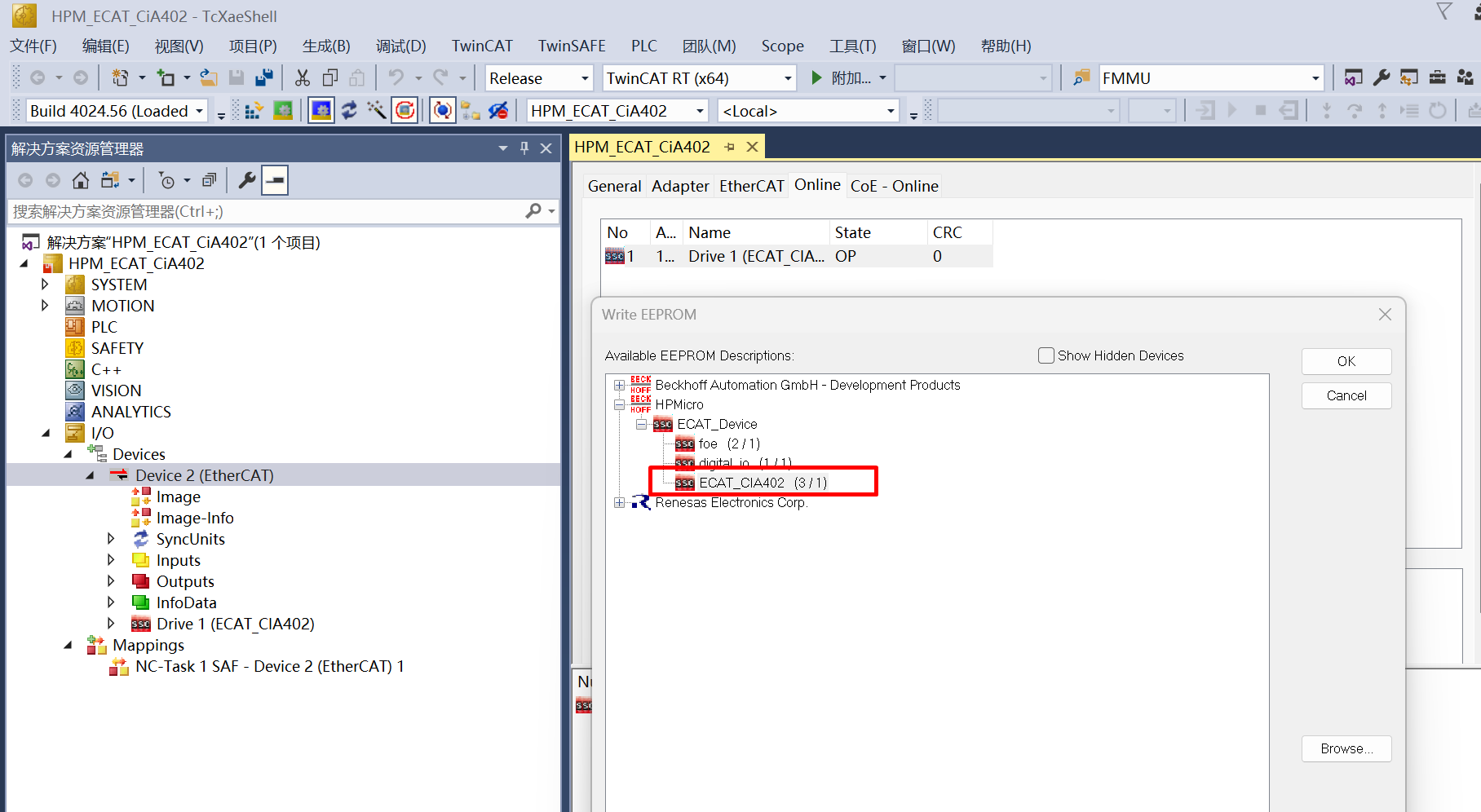
12.1.5.5. 5.5 更新EEPROM
请参照ECAT_IO的README, 选择正确的ESI文件更新EEPROM内容
12.1.5.6. 5.6 NC轴控制操作
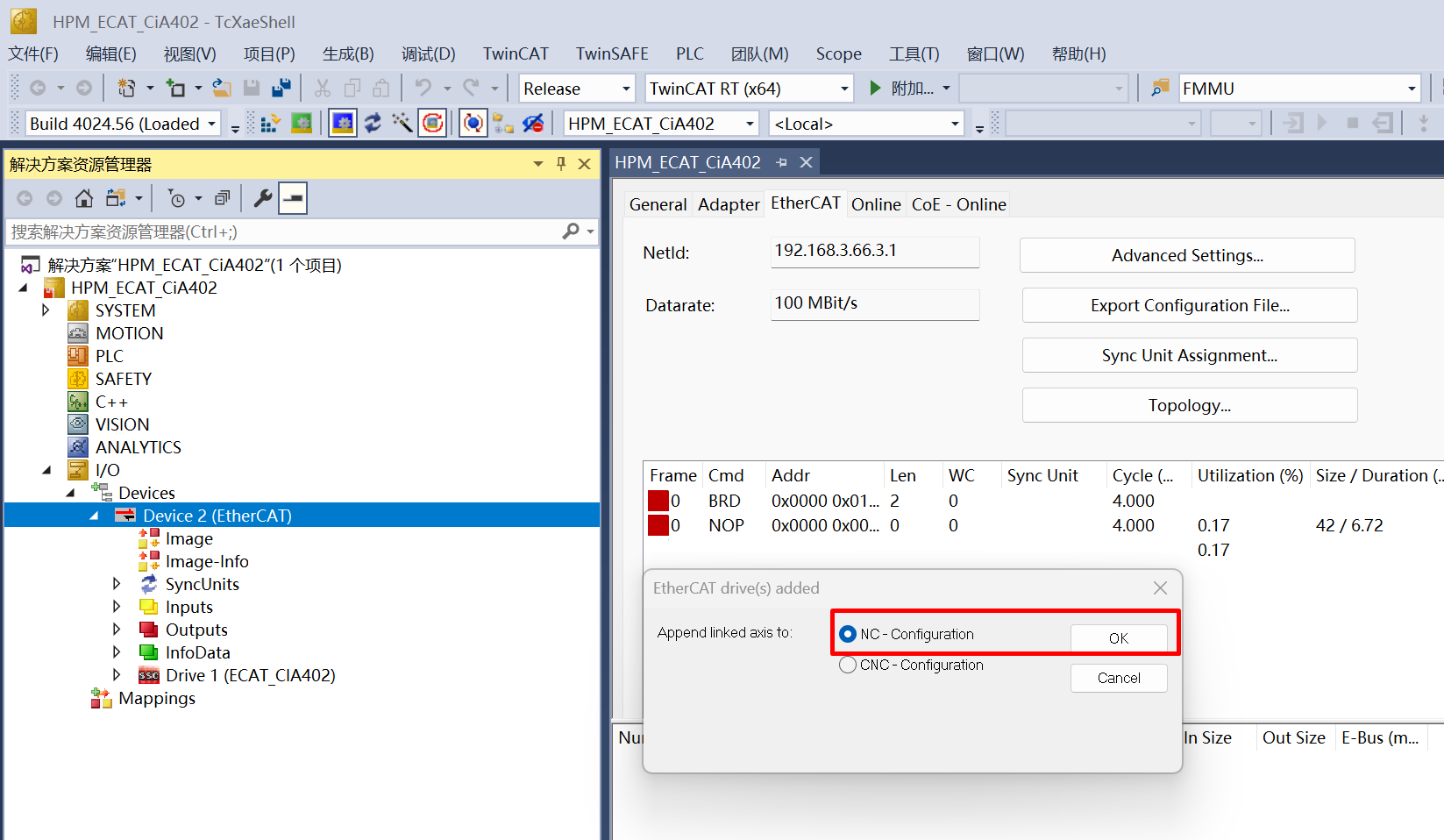
扫描设备,建立NC轴, 从站默认工作在csv模式:
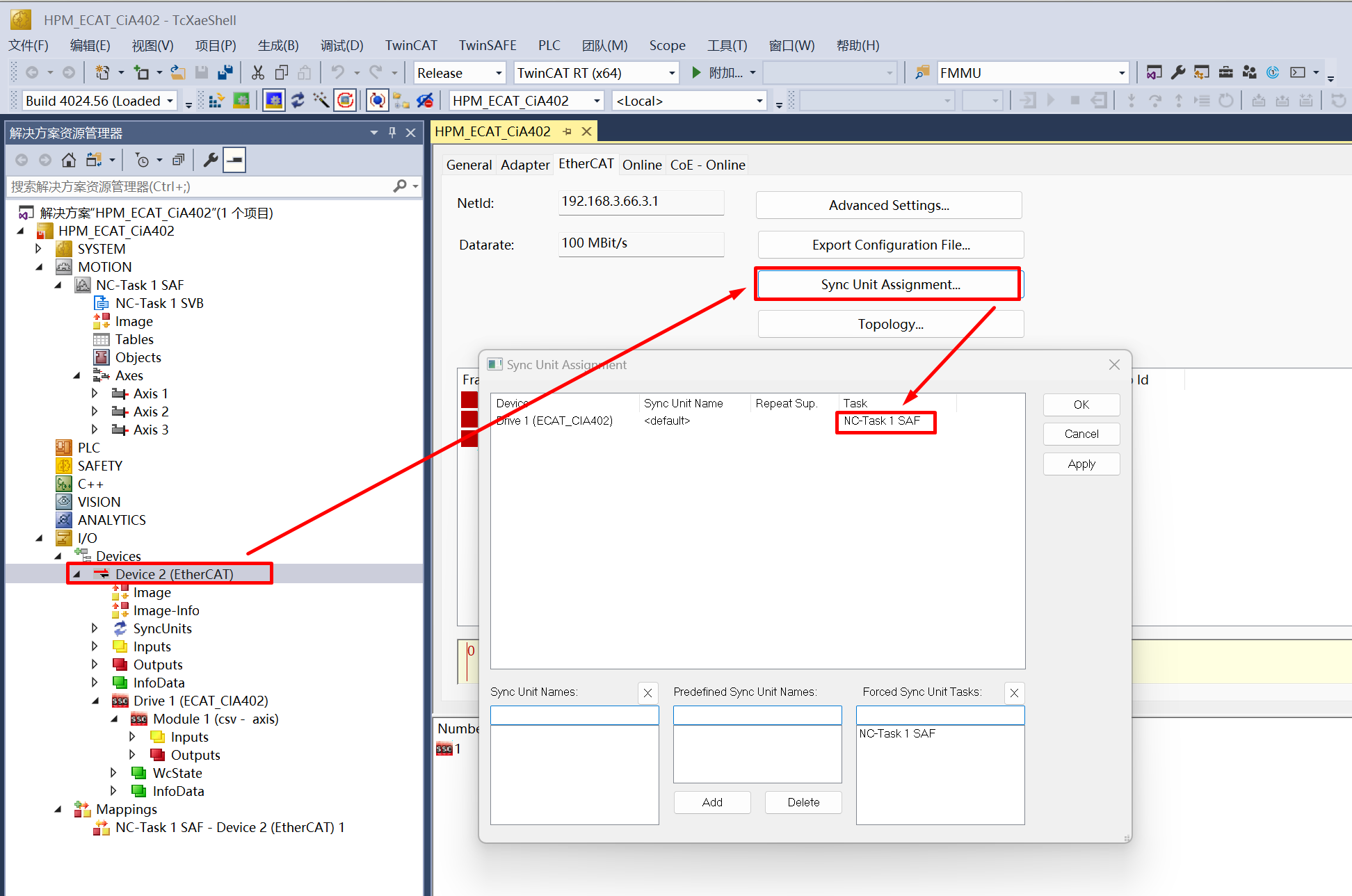
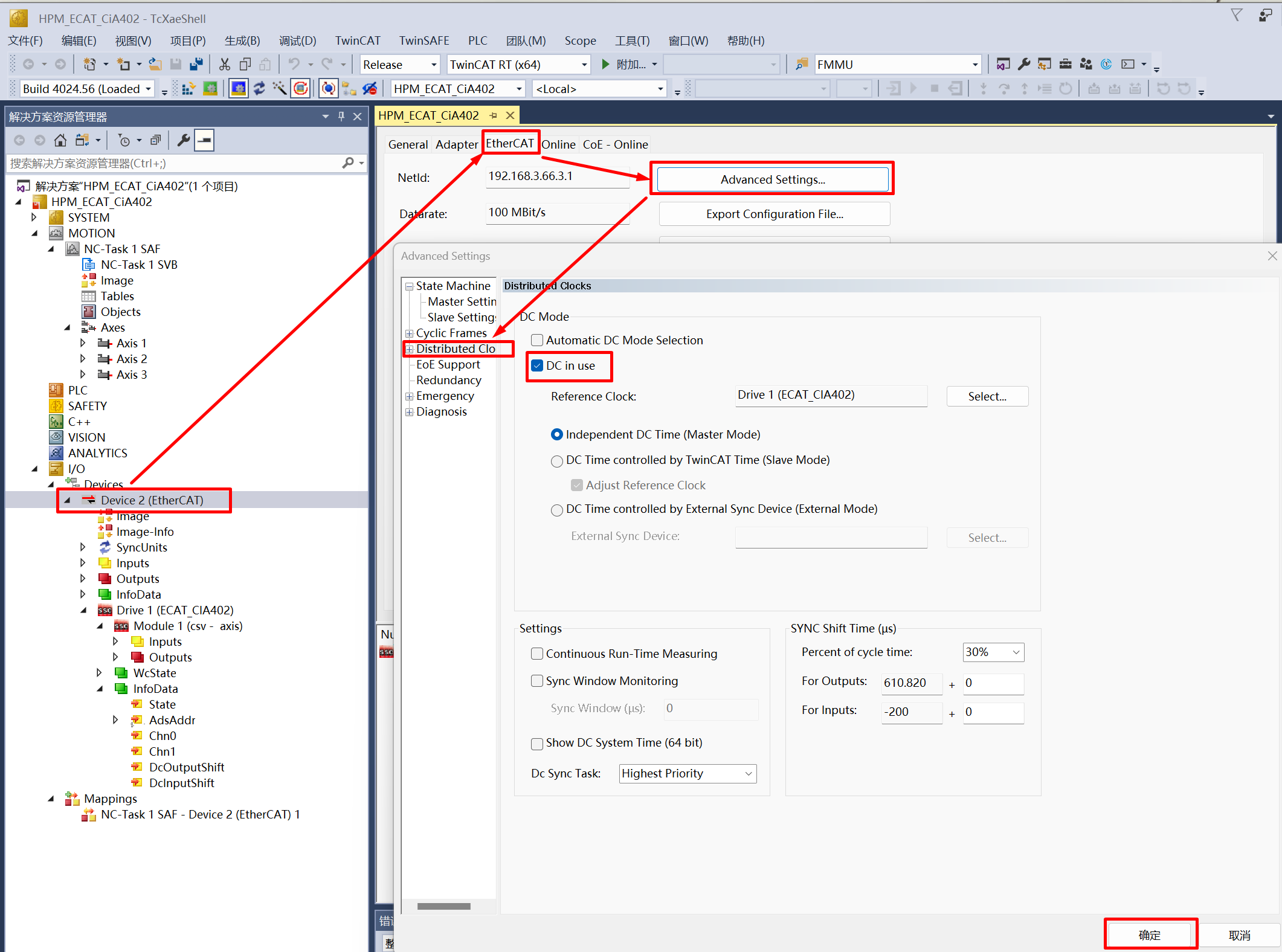
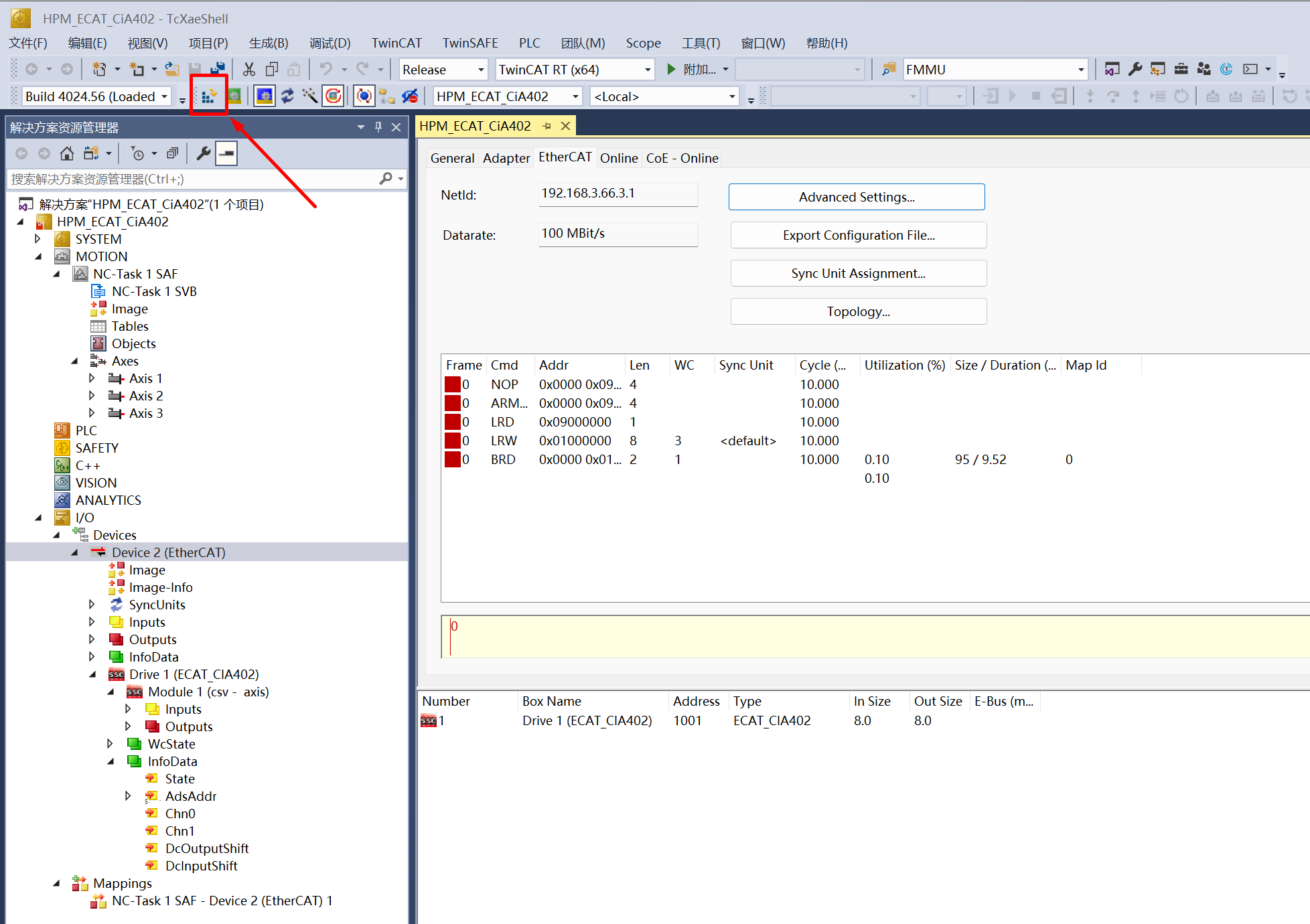
检查同步单元设置, DC周期会与NC-Task同步
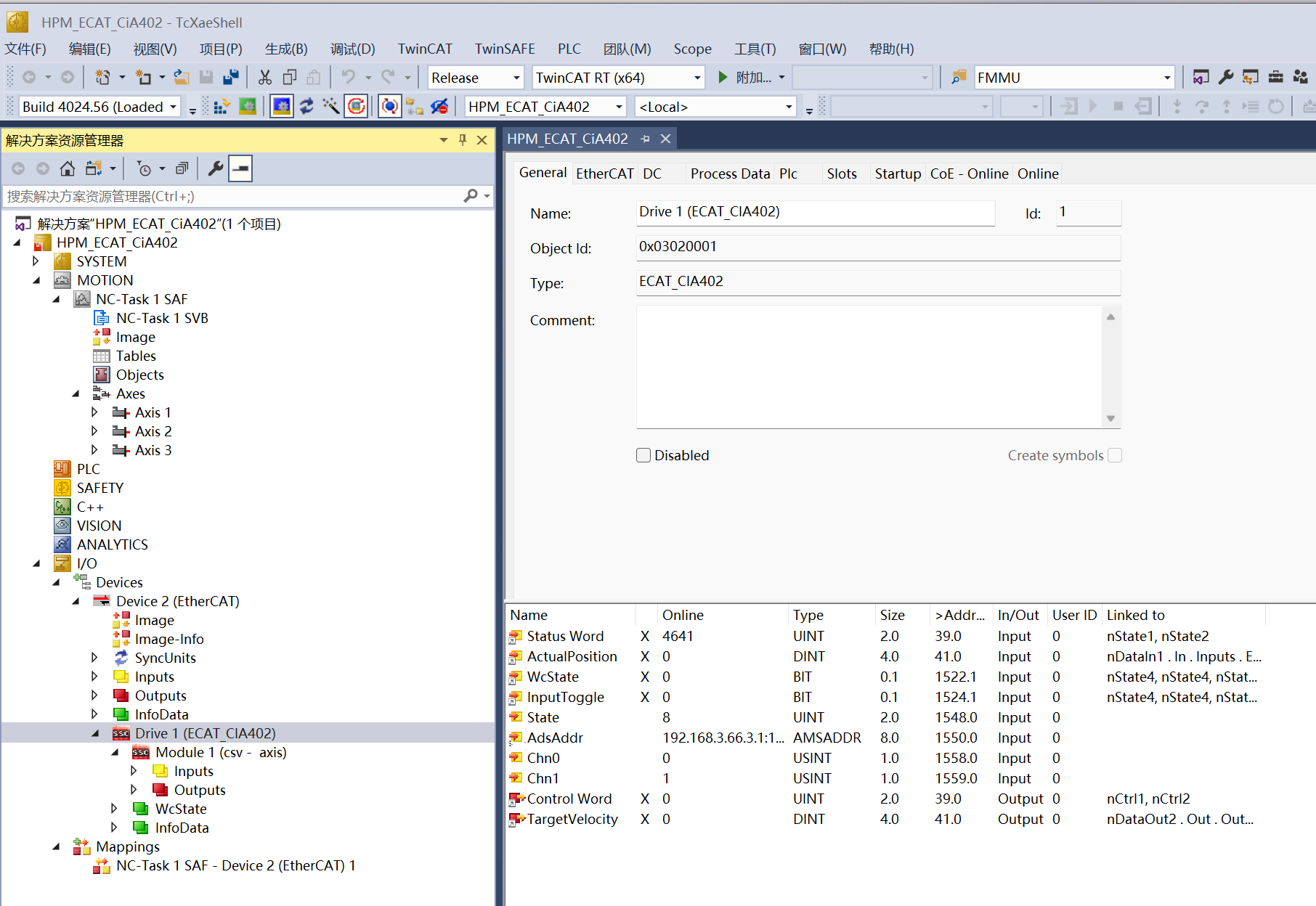
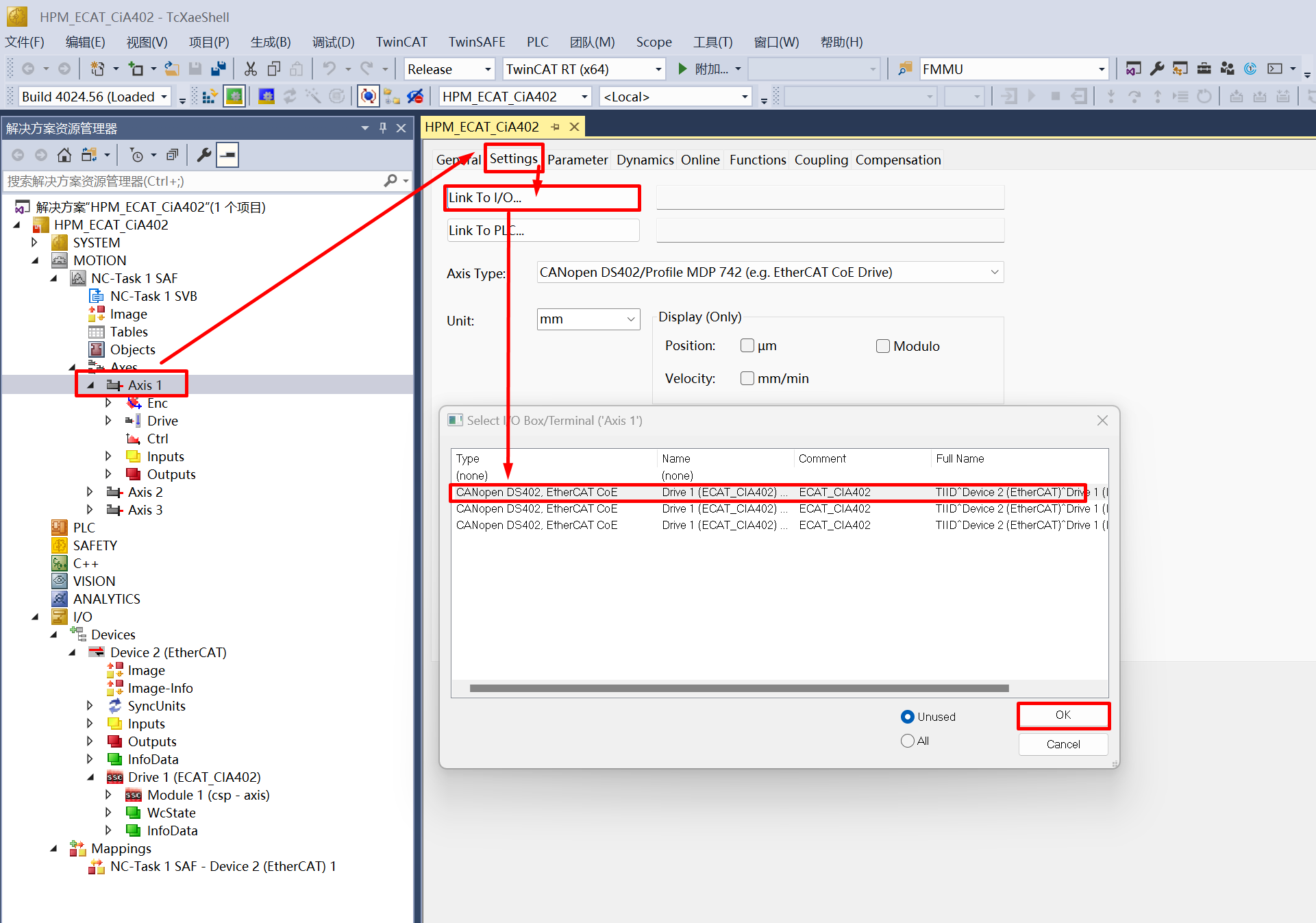
检查NC Axis与Device的链接关系
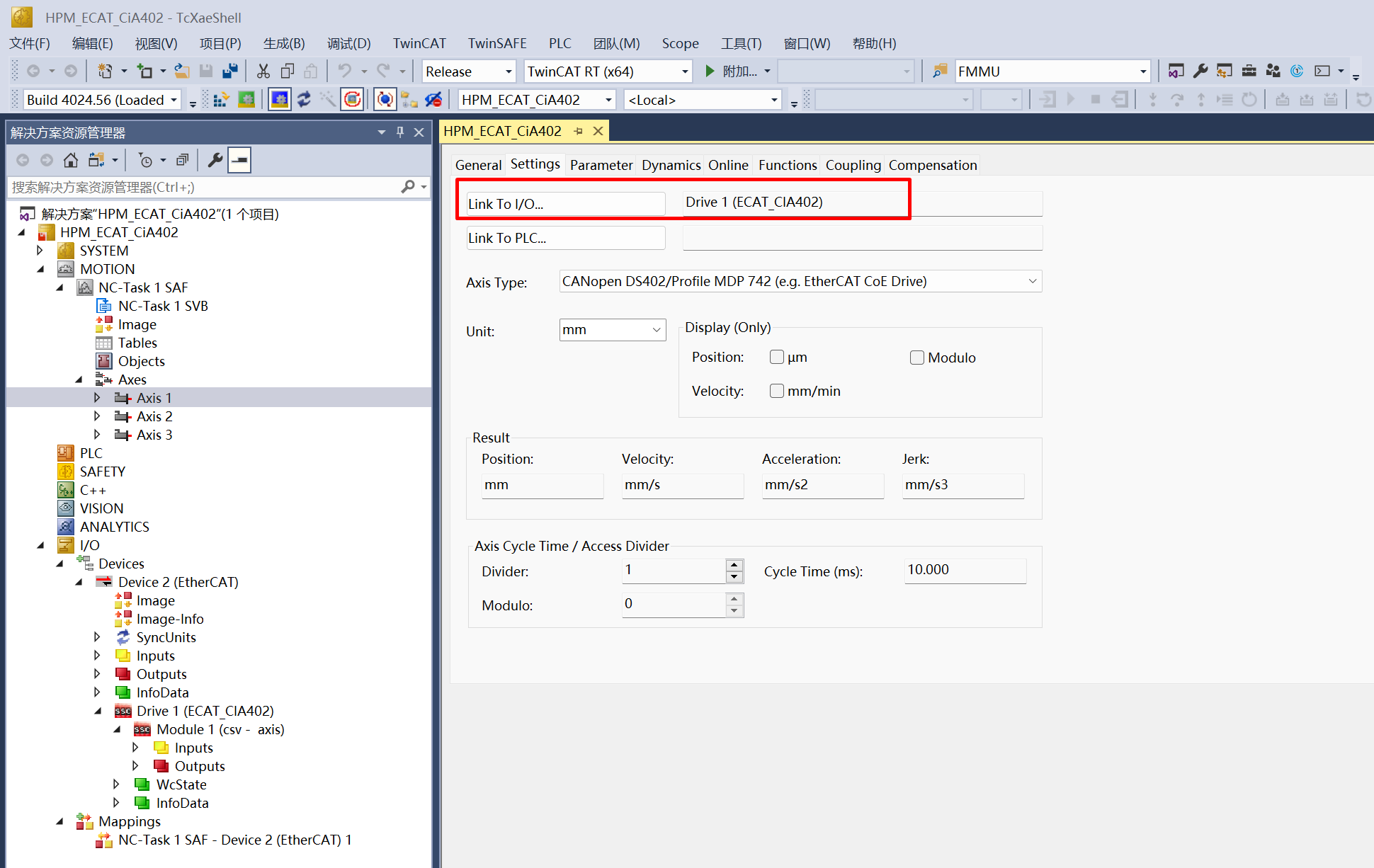
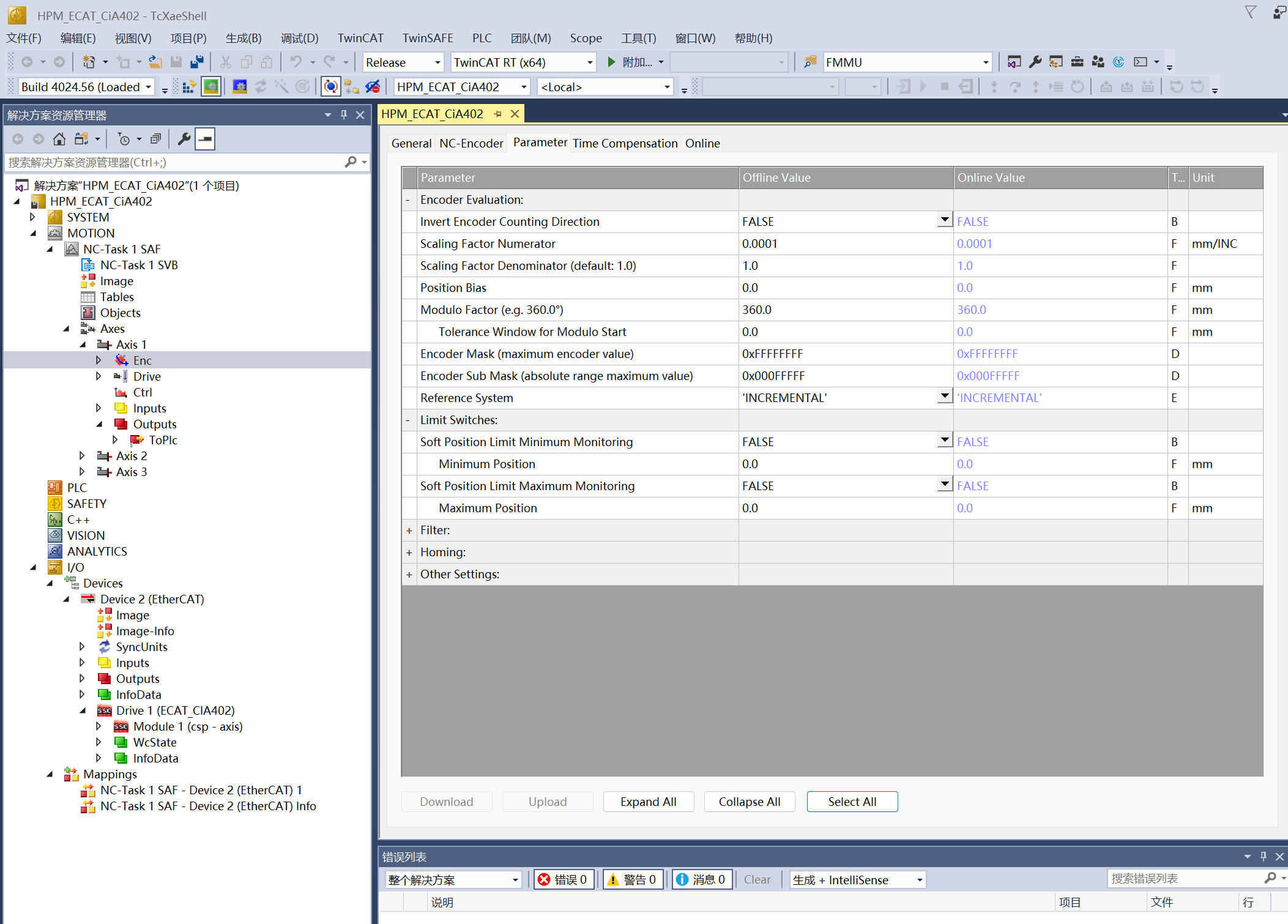
检查NC Axis的Enc参数
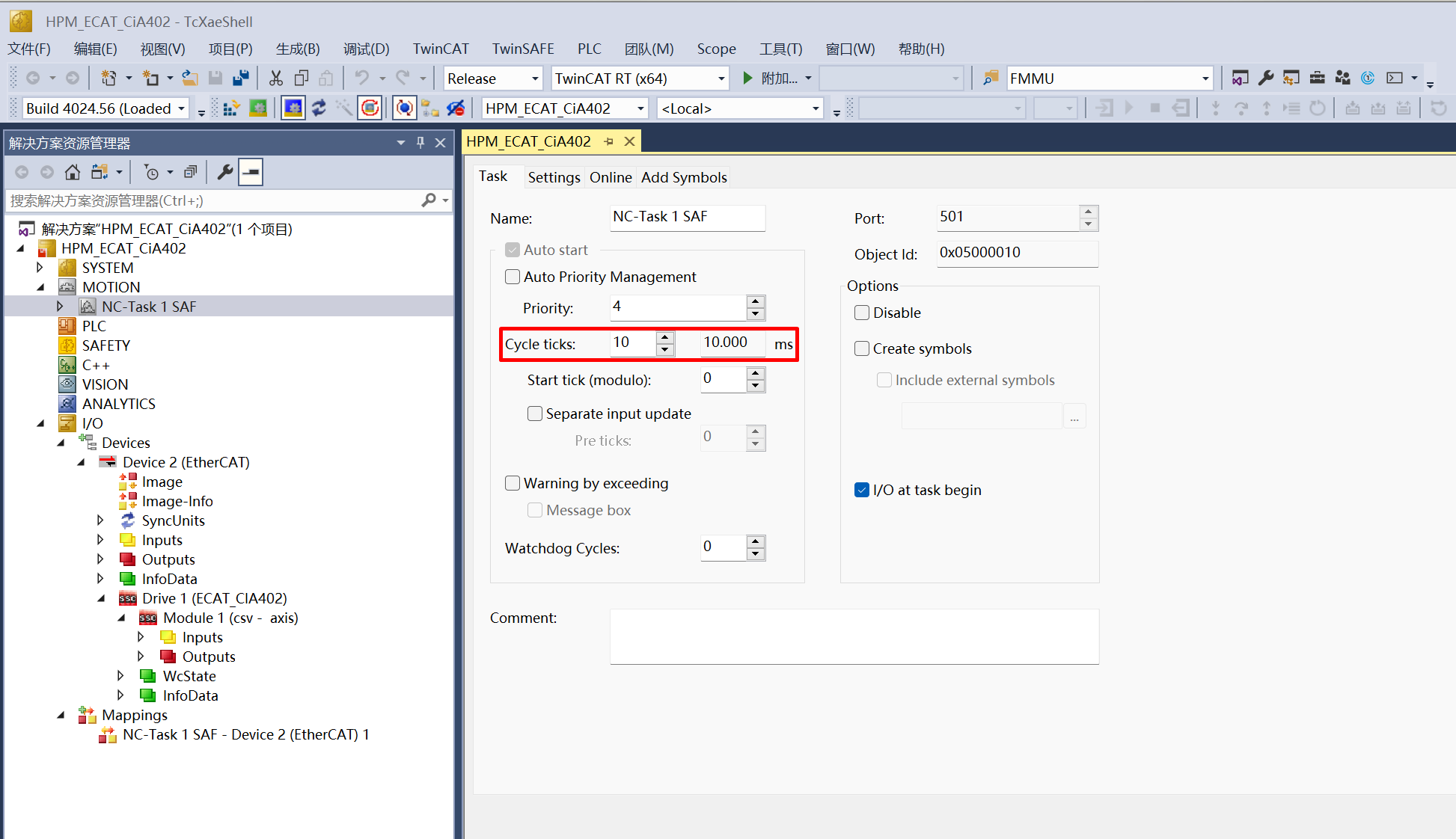
设置NC Task周期, DC周期应与该值相同。
此处可以设置大一些的周期时间, 避免使用PC做TwinCAT主站时, 由于PC实时性较差造成通信抖动引起”0x1a Synchronnization error”.
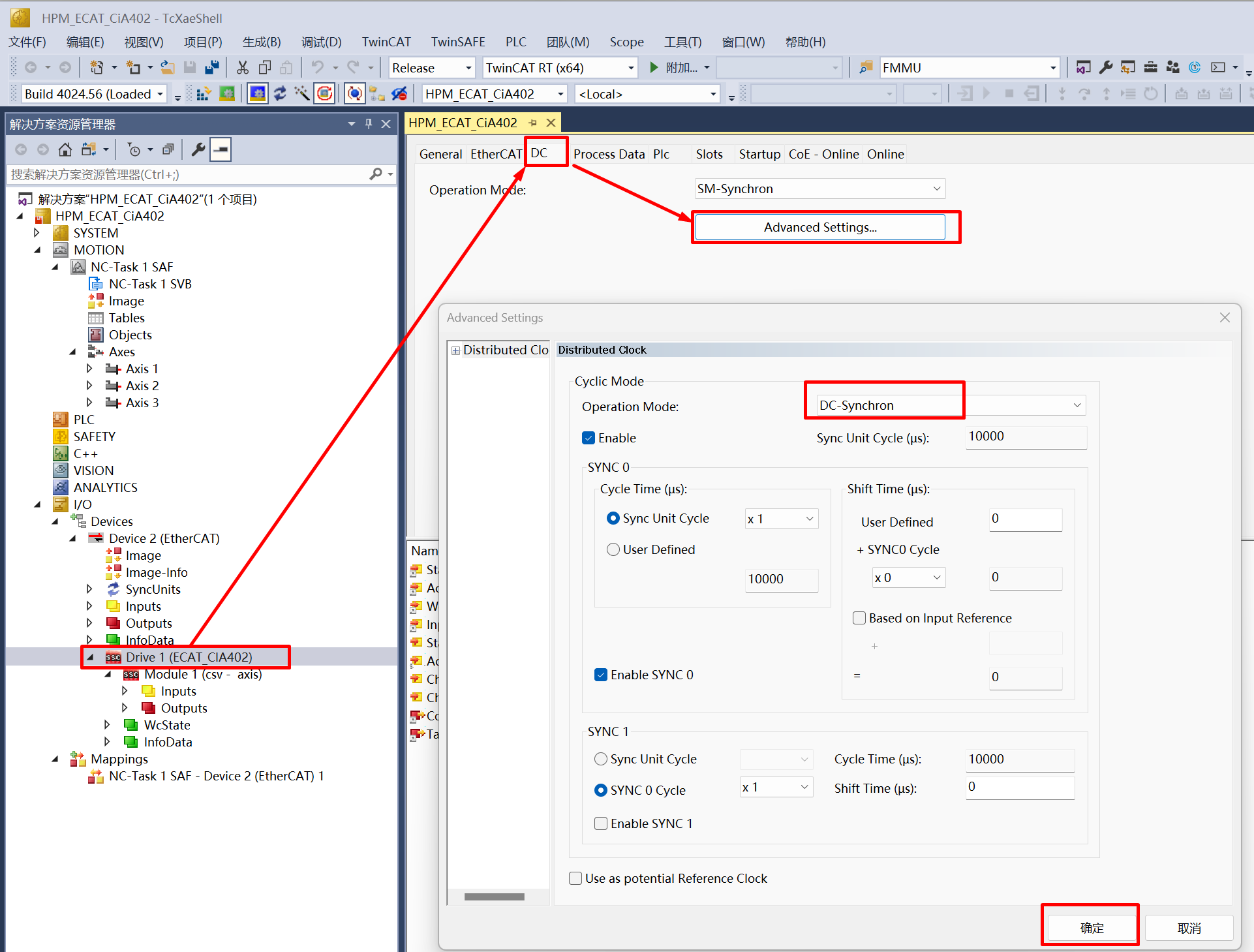
设置DC模式
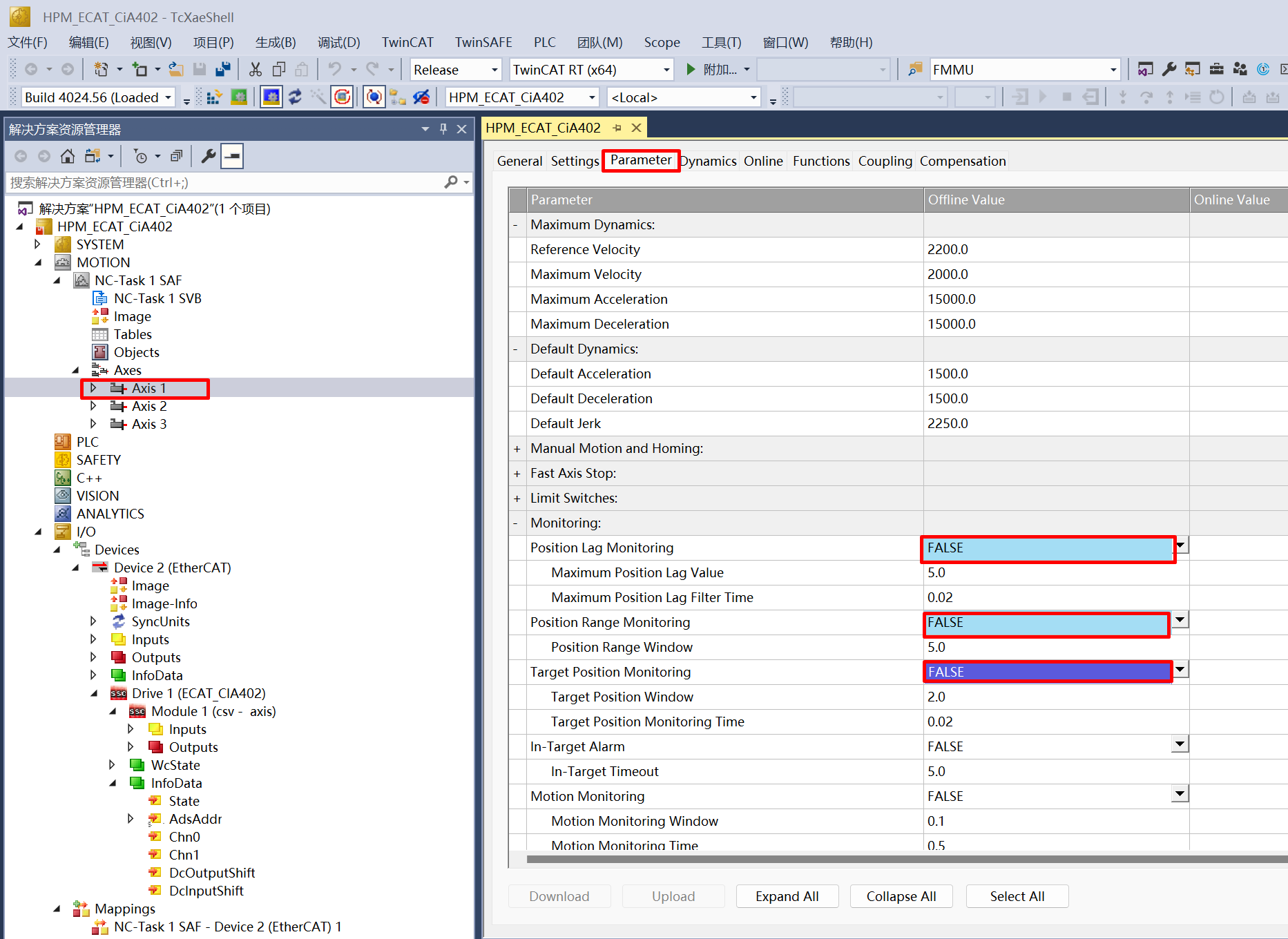
设置NC轴参数, 关闭主站的软件限位设置,避免测试操作中报错。
激活配置,进入运行模式
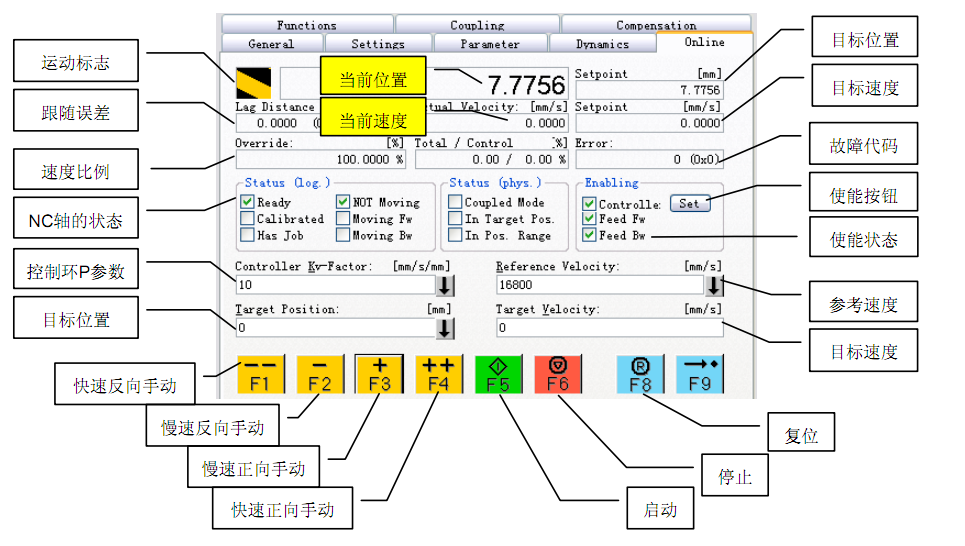
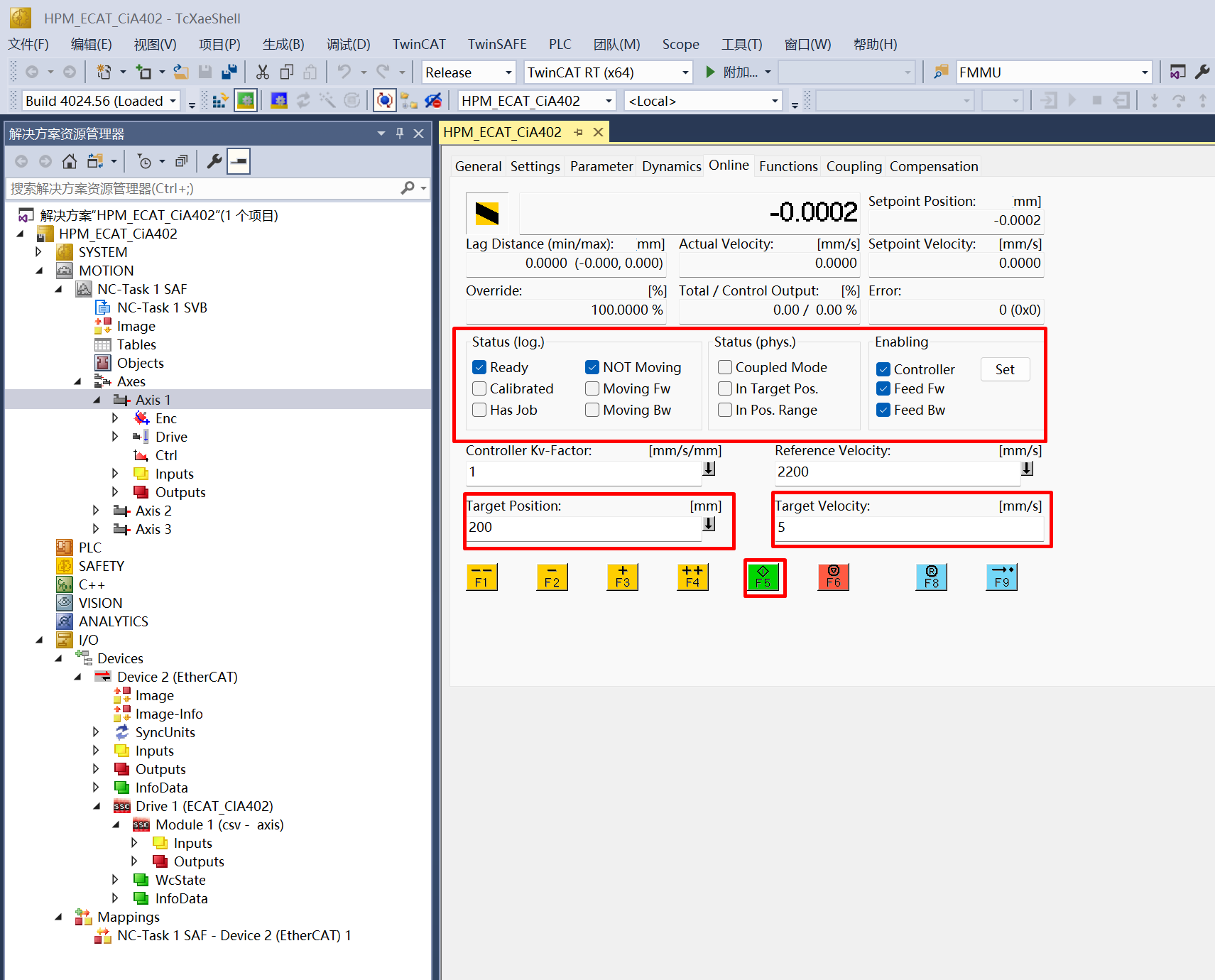
NC轴控制页面选项说明
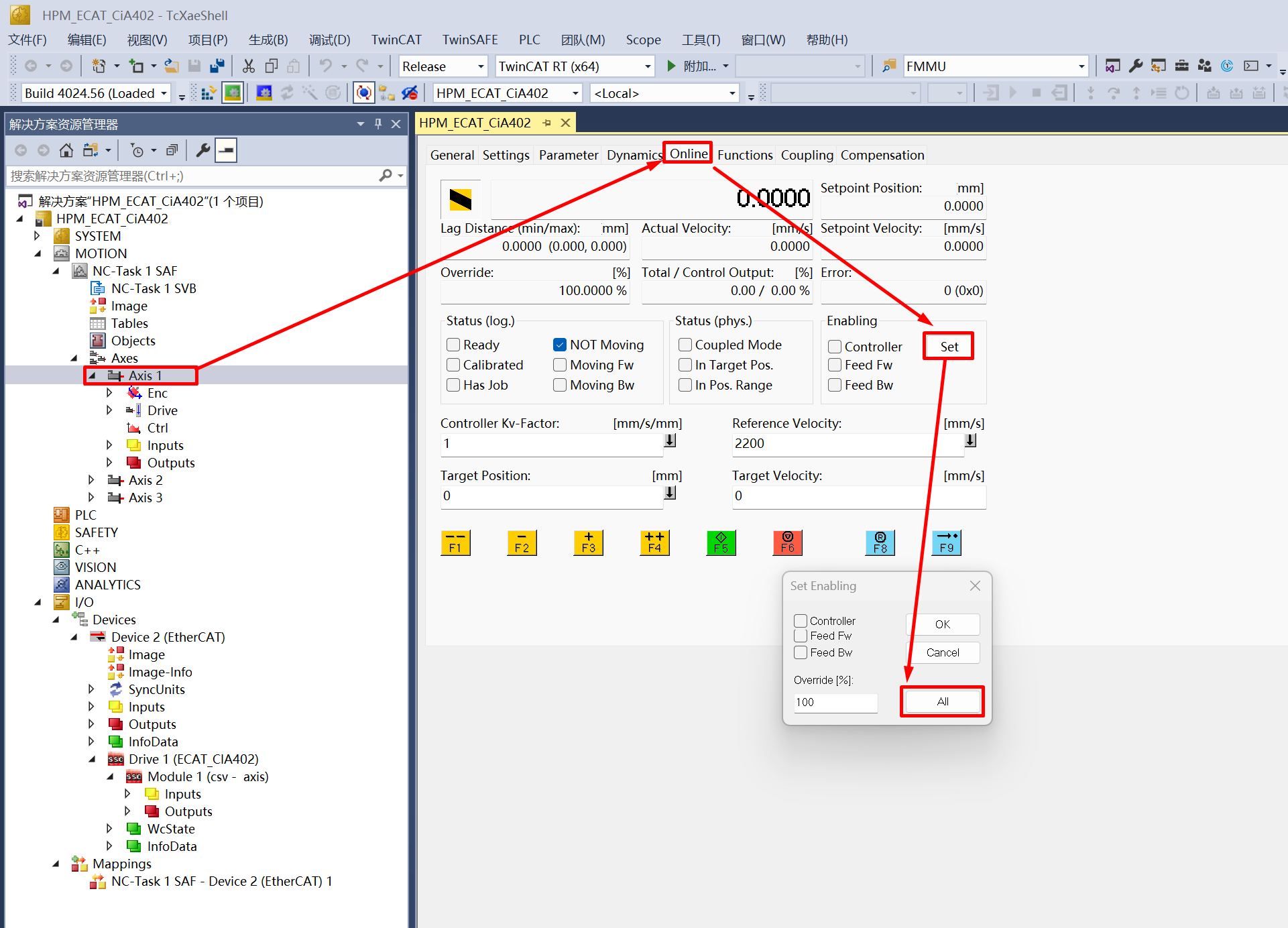
在线控制NC轴运动
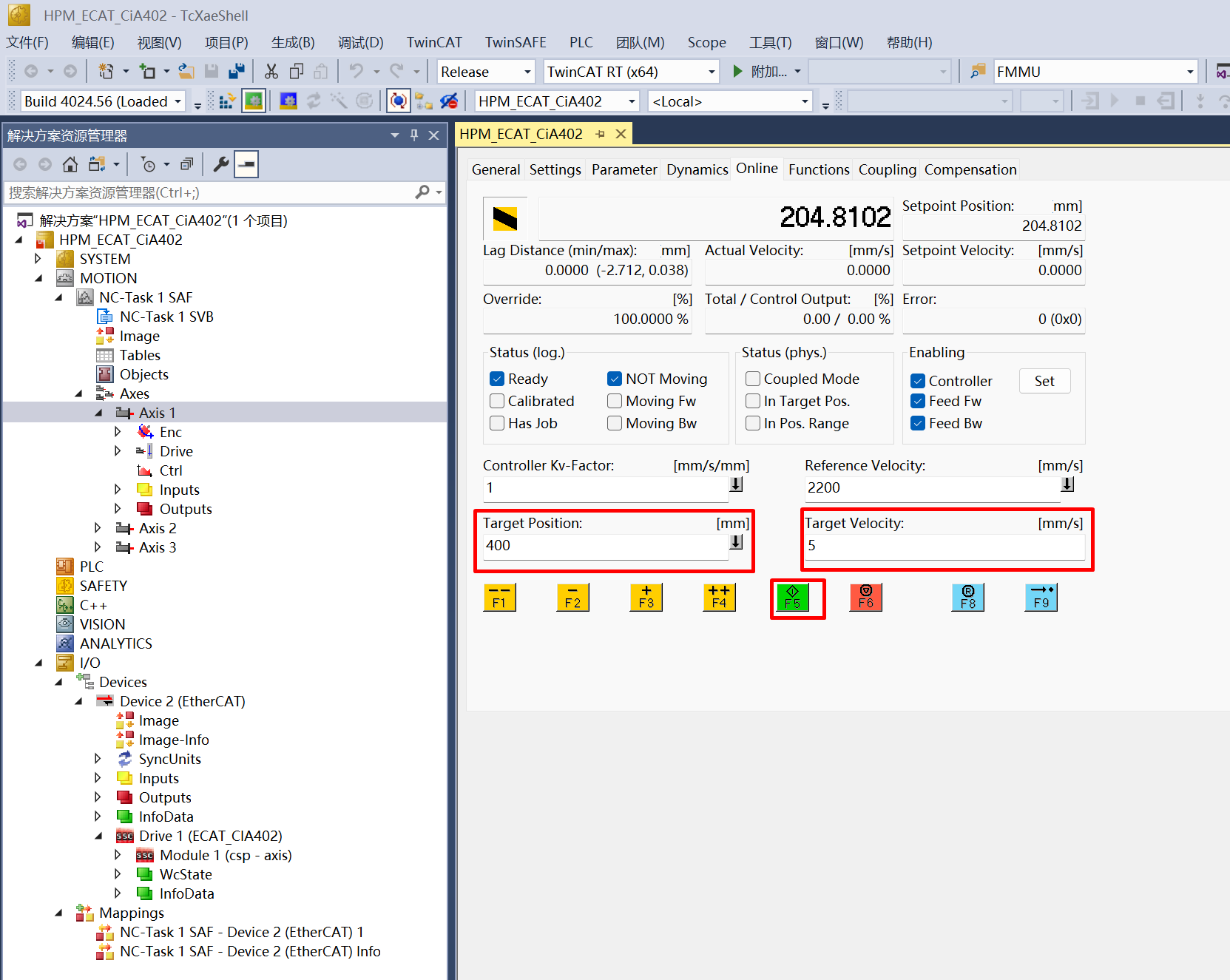
在”Enabling”选项中点击”Set->All”,启动控制器
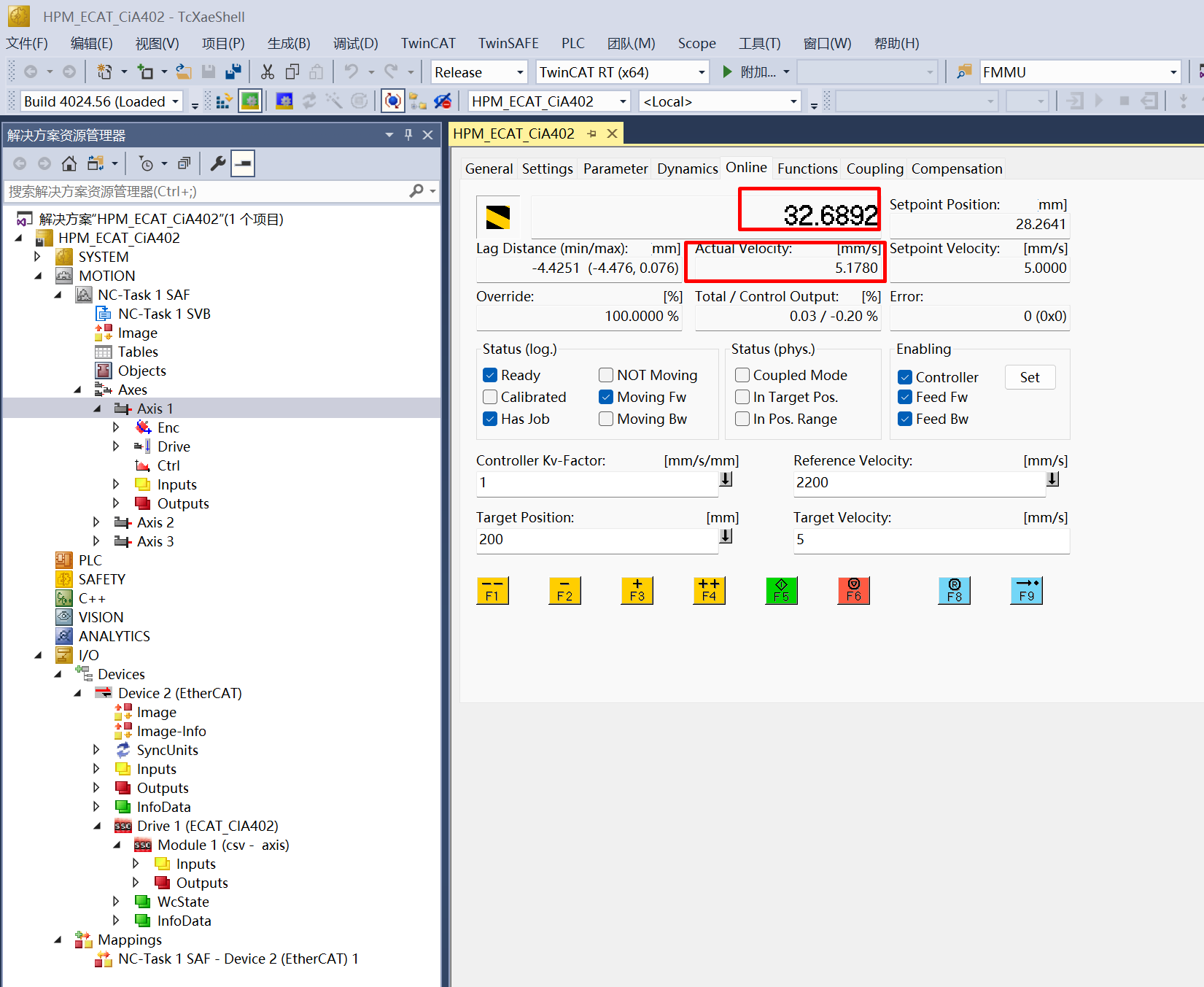
设置目标位置和速度, 注意目标速度值不应超过7mm/s(虚拟电机没有速度限制), 设置后点击”F5”启动
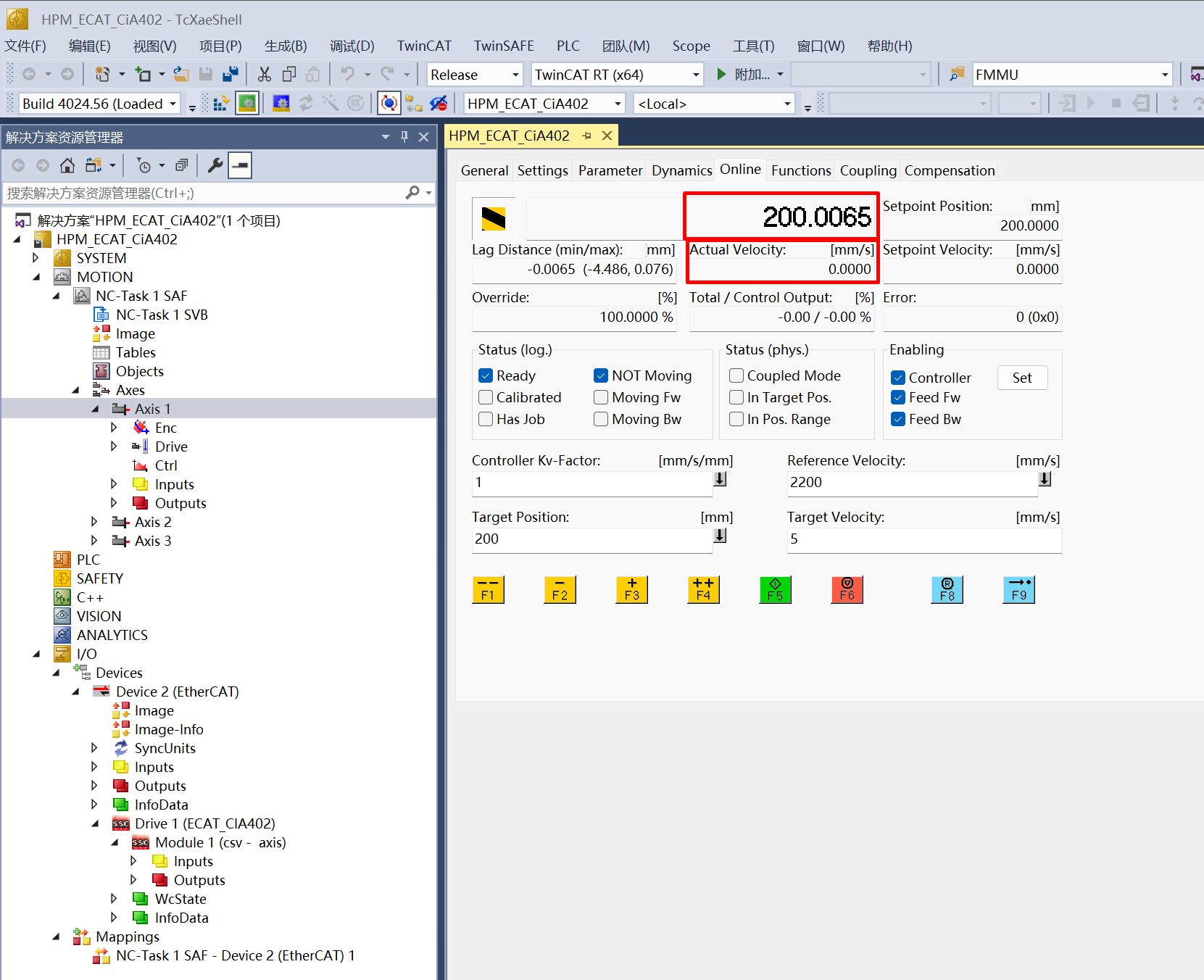
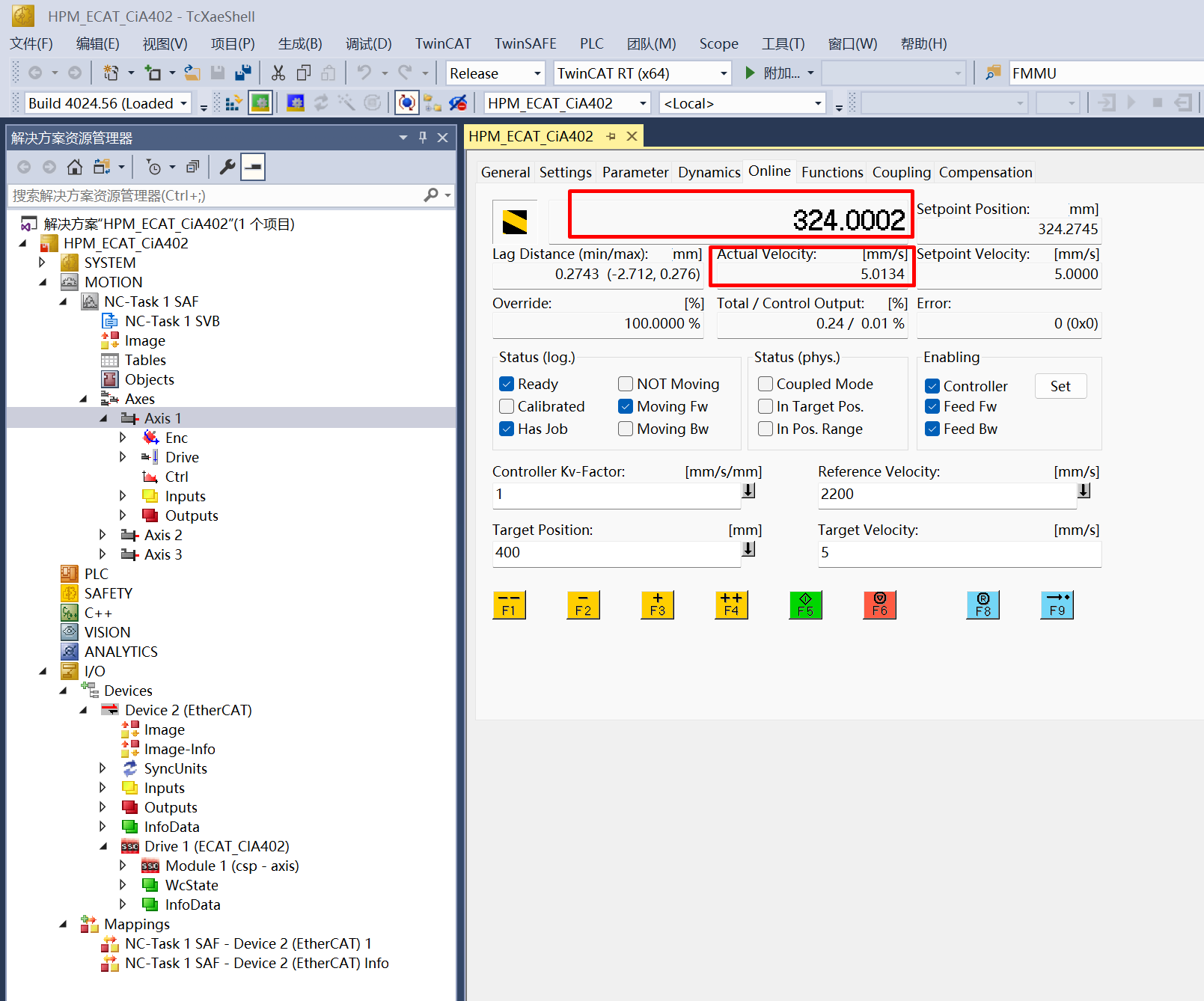
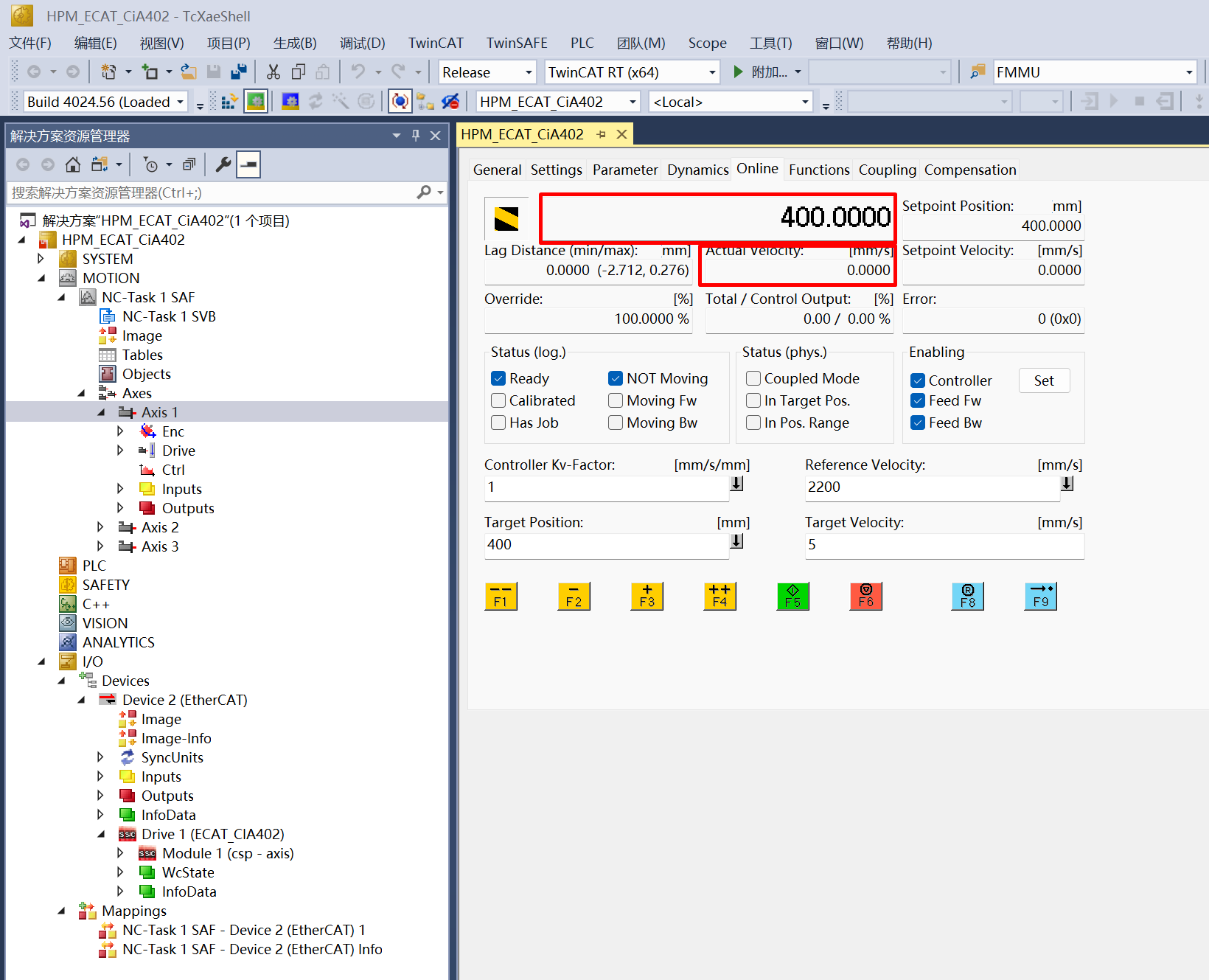
查看目标实际位置和速度
更改NC轴控制模式为csp
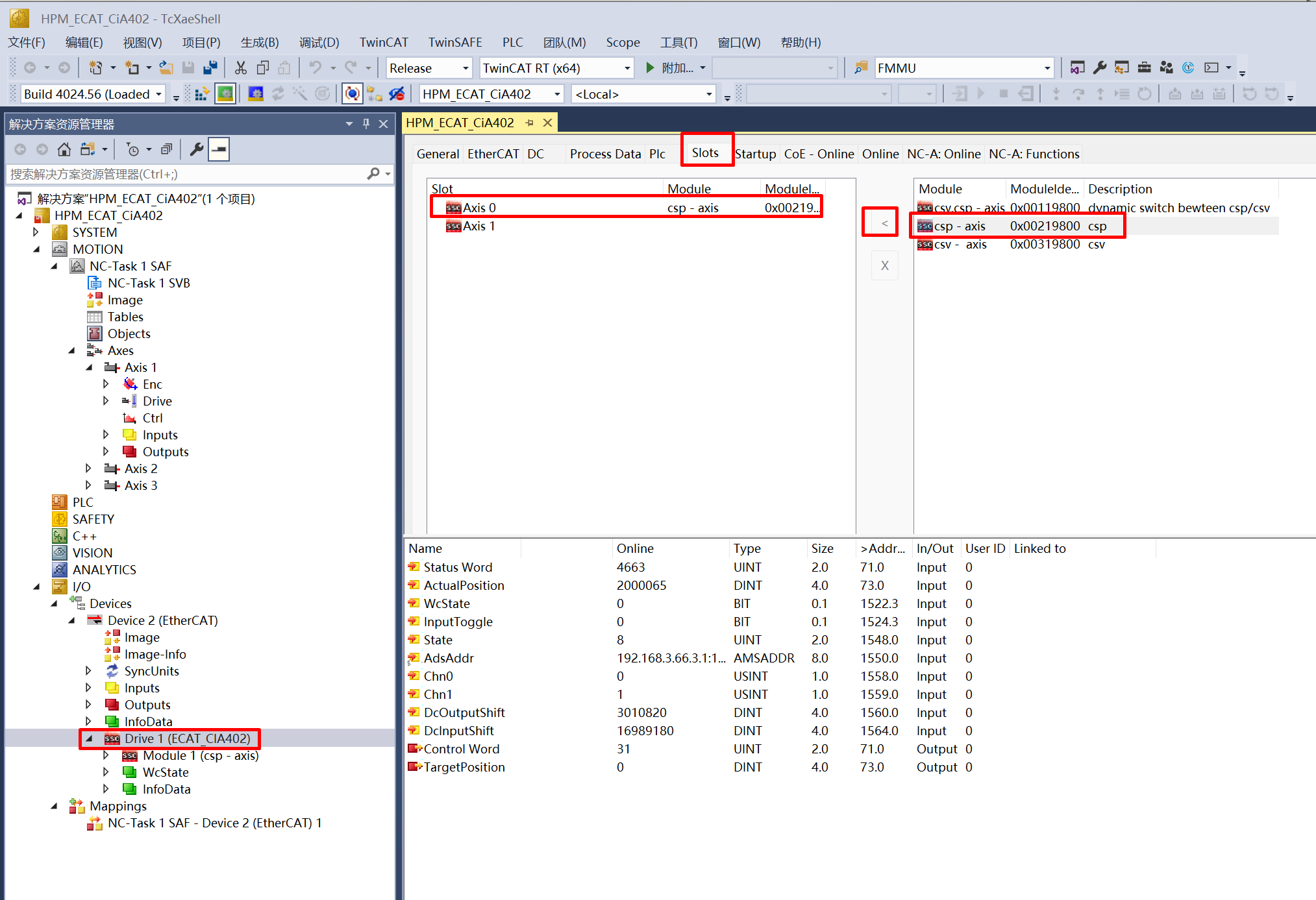
将NC Axis与Device重新链接
参考步骤8, 重新激活配置
按照上诉步骤使能控制器, 设置新的目标位置和速度, 观察实际位置和速度的变化
参考步骤10.a, 使能控制器
设置新的目标位置和速度,注意目标速度值不应超过7mm/s, 设置后点击”F5”启动
查看目标实际位置和速度
12.1.6. 6. 运行现象
当工程正确运行后, 串口终端会输出如下信息, 通过TwinCAT NC Axis控制页面可以控制电机运动:
当需要初始化EEPROM数据时,log如下:
EtherCAT CiA402 motor sample
Init EEPROM content.
Init EEPROM content successful.
EEPROM loading successful, no checksum error.
当不需初始化EEPROM数据时,log如下:
EtherCAT CiA402 motor sample
No need to init EEPROM content.
EEPROM loading successful, no checksum error.