54.4.3. QEO_PWM_OUT
54.4.3.1. 概述
QEO_PWM_OUT示例工程展示了QEO (Quadrature Encoder Output) 外设根据位置信息控制PWM输出的功能。QEO可以接收软件注入或硬件(如MMC)提供的位置信息,结合预设的PWM换向表和分辨率设置,生成相应的PWM波形,常用于步进电机的控制。
54.4.3.2. 工作流程
本示例提供了两种工作模式演示:
软件位置注入模式 配置步骤:
初始化QEO模块,配置PWM输出
配置4相PWM输出表:
设置每个相位的PWM强制输出状态
配置4步换相序列实现电机换相控制
设置分辨率线数
软件位置注入流程:
计算每步位置增量
使能软件位置注入
循环注入位置值实现PWM输出切换
等待位置计算完成
关闭软件位置注入
硬件位置输入模式
本例中使用MMC (Motor Motion Control) 外设提供位置信息给QEO,QEO根据接收到的位置信息输出对应的PWM波形。
配置步骤:
初始化QEO模块,配置PWM输出
配置4相PWM输出表:
设置PWM通道为非强制输出状态(PWM占空比可调)
配置安全模式输出表
配置硬件触发和安全模式:
设置TRGM触发QEO进入安全模式
新位置到来时自动退出安全模式
配置PWM为中心对齐模式
配置MMC位置输出:
通过TRGM连接MMC位置输出到QEO
配置MMC开环预测模式
使能电机时间戳功能
54.4.3.3. 硬件设置
观察指定PWM引脚的输出波形,(请参考 引脚描述 部分)。
54.4.3.4. 运行现象
当工程正确运行后,可以观察到以下现象:
串口终端输出信息:
QEO PWM example
QEO generate PWM signal with software inject postion
QEO generate PWM signal with hardware(MMC) provide postion
PWM输出波形:
使用逻辑分析仪可以观察到两种不同的PWM波形:
软件位置注入模式下的强制输出波形:
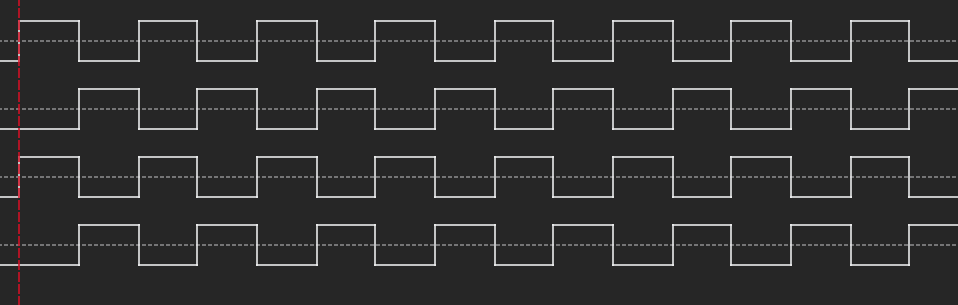
硬件位置输入模式下的PWM调制波形:
