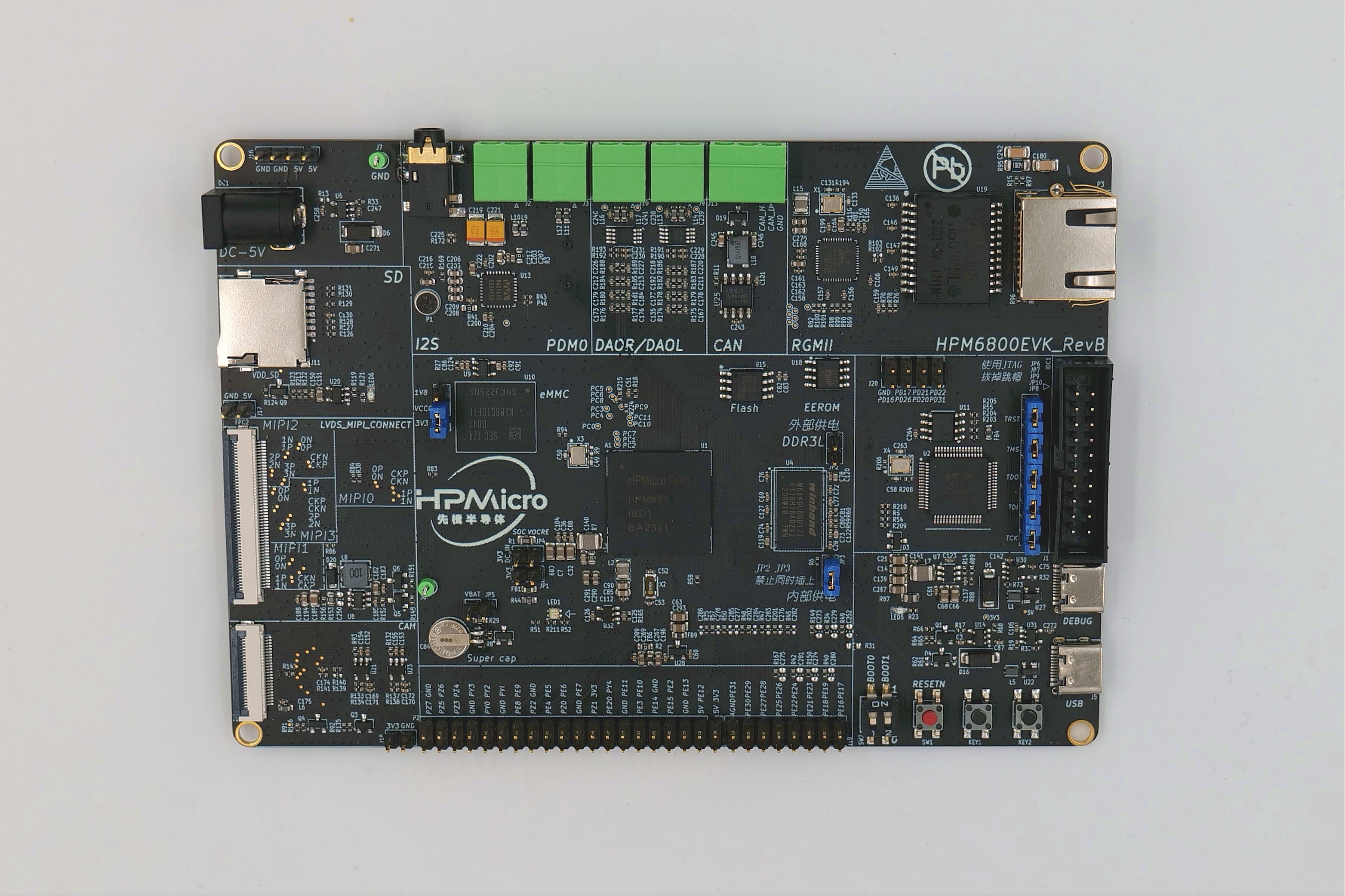
8. HPM6800EVK开发板
8.1. 概述
HPM6800是一款主频达600MHz的单核微控制器。该芯片拥有最大1M字节的连续片上RAM,并集成了丰富的存储接口,如SDRAM,Quad SPI NOR flash, SD/eMMC卡。同时它也提供多种音视频接口包括LCD显示,像素DMA,摄像头以及I2S音频接口。
8.2. 板上硬件资源
HPM6800 微控制器 (主频600Mhz, 1M片上SRAM)
板载存储
512MB SDRAM (DDR3L 16bits)
16MB Quad SPI NOR Flash
16GB eMMC
显示/摄像头
LCD接口
MIPI-DSI
MIPI-CSI
摄像头(DVP)接口
以太网
1000 Mbits PHY
USB
USB type C (USB 2.0 OTG) connector x1
音频
Line in
Mic
Speaker
DAO
其他
TF卡槽
RGB LED
CAN
8.3. 拨码开关 SW2
Bit 1,2控制启动模式
Bit[2:1] |
功能描述 |
|---|---|
OFF, OFF |
Quad SPI NOR flash 启动 |
OFF, ON |
eMMC启动 |
ON, OFF |
在系统编程 |
8.4. 按键
名称 |
功能 |
|---|---|
USER BUTTON (KEY1) |
GPIO 按键 |
WBUTN (KEY2) |
WAKE UP 按键 |
RESETN (SW1) |
Reset 按键 |
8.5. 插件
ADC/DAC参考电压连接
连接
描述
J18
参考电压
eMMC电压选择
连接
描述
J6
eMMC电压3.3V和1.8V选择
注:在测eMMC示例时需要将跳帽短接VCCQ 和1.8V
8.6. 引脚描述
UART0串口引脚:
UART0用于调试控制台串口。
功能 |
引脚 |
位置 |
|---|---|---|
UART0.TX |
PA00 |
DEBUGUART0 |
UART0.RX |
PA01 |
DEBUGUART0 |
UART3串口引脚:
UART3用于一些使用UART的功能测试,例如MICROROS_UART,USB_CDC_ACM_UART, MODBUS_RTU等。
功能 |
引脚 |
位置 |
备注 |
|---|---|---|---|
UART3.TX |
PE15 |
P2[8] |
|
UART3.RX |
PE14 |
P2[10] |
|
UART3.break |
PE04 |
P2[24] |
产生uart break信号 |
PUART串口引脚:
PUART用于低功耗测试,例如唤醒等。
功能 |
引脚 |
位置 |
|---|---|---|
PUART.TX |
PY00 |
P2[32] |
PUART.RX |
PY01 |
P2[29] |
SPI引脚:
功能 |
引脚 |
位置 |
|---|---|---|
SPI3.CSN |
PE04 |
P2[24] |
SPI3.SCLK |
PE05 |
P2[23] |
SPI3.MISO |
PE06 |
P2[21] |
SPI3.MOSI |
PE07 |
P2[19] |
I2C引脚:
功能 |
引脚 |
位置 |
|---|---|---|
I2C1.SCL |
PE13 |
P2[5] |
I2C1.SDA |
PE12 |
P2[3] |
ADC16引脚
功能 |
引脚 |
位置 |
|---|---|---|
ADC0.INA8 |
PE16 |
J19[15] |
GPTMR 引脚
功能 |
引脚 |
位置 |
备注 |
|---|---|---|---|
GPTMR2.CAPT_0 |
PE22 |
J19[9] |
|
GPTMR2.COMP_0 |
PE23 |
J19[12] |
SPI模拟I2S的MCLK |
GPTMR2.COMP_1 |
PE24 |
J19[10] |
SPI模拟I2S的LRCK |
GPTMR2.COMP_2 |
PE26 |
J19[6] |
SPI模拟I2S的BLCK |
耳机接口
功能 |
位置 |
标准 |
|---|---|---|
3.5mm耳机接口 |
J4 |
OMTP |
音频输入接口
功能 |
位置 |
|---|---|
麦克风 |
P1 |
DAO接口
功能 |
位置 |
|---|---|
喇叭接口(左) |
J9 |
喇叭接口(右) |
J10 |
以太网PPS信号引脚
功能 |
位置 |
|---|---|
ENET0.EVTO0 |
J20[7] |
CAN 通信接口
功能 |
引脚 |
位置 |
输出 |
|---|---|---|---|
MCAN3.TXD |
PD15 |
U25[1] |
CAN.H J13[3] |
MCAN3.RXD |
PD14 |
U25[4] |
CAN.L J13[2] |
MCAN3.STBY |
PD13 |
U25[8] |
Tamper 接口
功能 |
引脚 |
位置 |
模式 |
|---|---|---|---|
TAMP.04 |
PZ04 |
P2[35] |
主动模式 |
TAMP.05 |
PZ05 |
P2[38] |
主动模式 |
TAMP.06 |
PZ06 |
P2[37] |
被动模式 |
SPI模拟I2S CS引脚
功能 |
位置 |
备注 |
|---|---|---|
PE27 |
J19[5] |
控制SPI从机CS的引脚 |